Из условий электрического равновесия цепи питания ЭМС (по второму закону Кирхгофа с учетом ЭДС источника питания еи.п, обмотки ео и сопротивления цепи питания Rц.п), баланса сил в механическом оборудовании (по второму закону Ньютона с учетом электромагнитного усилия, развиваемого ЭМ FЭМ, компонент силы сопротивления движению Fс, массы подвижных частей mп.ч), очевидной зависимости скорости якоря vя от его перемещения xя и компонент формулы (1) динамика электромагнитного привода описывается системой дифференциальных уравнений:
 ; (2)
; (2)
 ; (3)
; (3)
 . (4)
. (4)
При этом координата перемещения х определяется изменением величины рабочего зазора d относительно исходного (начального) значения δ0:
x=δ0 – δ.
Вид получаемых статических характеристик иллюстрирует рис. 1. Как видно из представленного рисунка все характеристики нелинейны. Это обуславливает и нелинейность свойств всего электромагнитного привода.
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 2. Статические характеристики реальной ЭМС с втягивающимся якорем с размерами и свойствами, близкими к исследуемому ЭММ
Схемы включения реле согласно
рис. 3, а…в позволяют снизить ![]() и соответственно
и соответственно ![]() , а включение реле по рис. 3, г...е, мало влияя на
, а включение реле по рис. 3, г...е, мало влияя на ![]() , позволяет увеличить
, позволяет увеличить ![]() за счет возрастания
за счет возрастания ![]() при отпускании.
при отпускании.
Объяснить эффекты изменения ![]() при срабатывании и отпускании можно исходя
из анализа переходных процессов в представленных
схемах (выполнить самостоятельно). Проводя
такой анализ, следует помнить, что дифференциальная
индуктивность обмотки ЭМ существенно различается
при притянутом и отпущенном якоре. Этот эффект в частности, положен в основу исполнения электромагнитных реле
времени с дополнительной медной гильзой на магнитопроводе (электромагнитным
демпфером), выделенным на рис. 3, e квадратом с отступлением
от принятых УГО.
при срабатывании и отпускании можно исходя
из анализа переходных процессов в представленных
схемах (выполнить самостоятельно). Проводя
такой анализ, следует помнить, что дифференциальная
индуктивность обмотки ЭМ существенно различается
при притянутом и отпущенном якоре. Этот эффект в частности, положен в основу исполнения электромагнитных реле
времени с дополнительной медной гильзой на магнитопроводе (электромагнитным
демпфером), выделенным на рис. 3, e квадратом с отступлением
от принятых УГО.
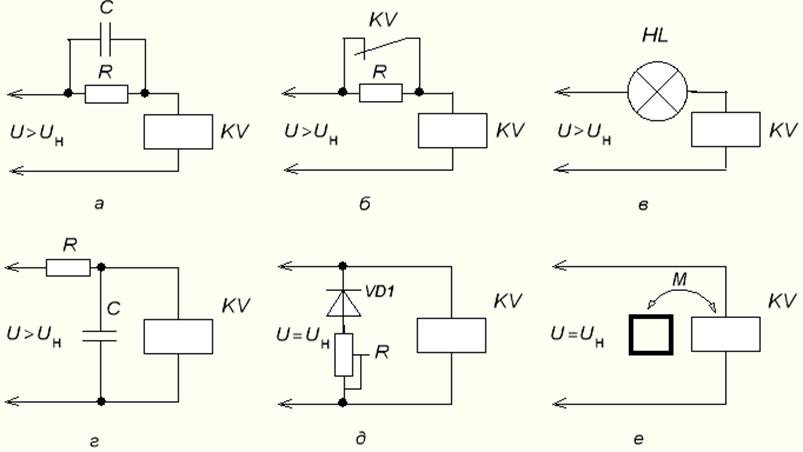 Рис. 3. Схемы
включения реле, позволяющие изменить:
Рис. 3. Схемы
включения реле, позволяющие изменить:
а ... в – время срабатывания; г ... е – время
отпускания.
В отличие от реле постоянного тока, реле управления
переменного тока не обеспечивает стабильного значения ![]() ,
так как здесь это время зависит от фазы питающего напряжения в момент
включения, и на величину тока в обмотке оказывает индуктивность обмотки.
,
так как здесь это время зависит от фазы питающего напряжения в момент
включения, и на величину тока в обмотке оказывает индуктивность обмотки.
Измерить ![]() и
и ![]() реле можно непосредственно электронным
секундомером (используются контактные группы реле) либо с помощью осциллографа (по кривым тока в обмотке). Результаты
измерений будут несколько отличаться. Причина этого расхождения ясна из представленного
выше рис. 1. Для этого необходимо обратить внимание на ток в коммутируемой
контактами цепи
реле можно непосредственно электронным
секундомером (используются контактные группы реле) либо с помощью осциллографа (по кривым тока в обмотке). Результаты
измерений будут несколько отличаться. Причина этого расхождения ясна из представленного
выше рис. 1. Для этого необходимо обратить внимание на ток в коммутируемой
контактами цепи ![]() .
.
Описание установки
Для работы используются два модуля, позволяющих исследовать влияние различных конструктивных и схемных решений реле на их свойства.
На первом модуле имеется четыре реле: переменного тока; постоянного тока практически такого же габарита, что и реле переменного тока, герконовое и поляризованное. Этот модуль используется для уяснения основополагающих положений работы электромагнитных реле без регистрации наблюдений в протоколе.
На втором
модуле установлено одно реле напряжения постоянного тока, используемое в различных схемах изменения ![]() . Результаты исследований, выполняемых с
этим реле, фиксируется в протоколе.
. Результаты исследований, выполняемых с
этим реле, фиксируется в протоколе.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.