Для
улучшения процессов в системе изменить значения ![]() ,
, ![]() , сравнить результат с п. 3.5.
, сравнить результат с п. 3.5.
а) ![]() =1,
=1,
![]() =1, γ1=500,
γ2=0,1
=1, γ1=500,
γ2=0,1
y
 t
t
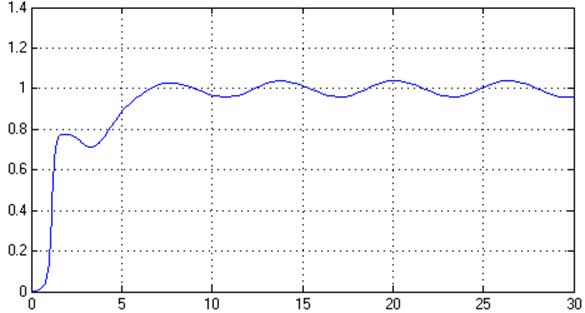
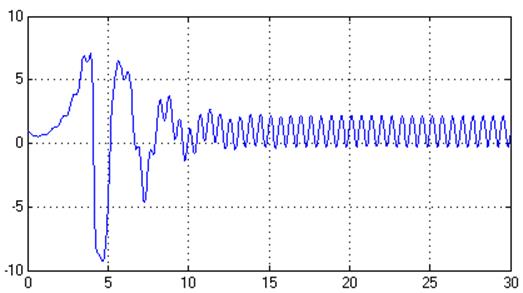
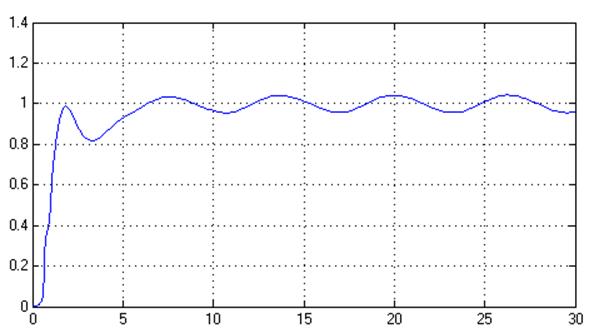
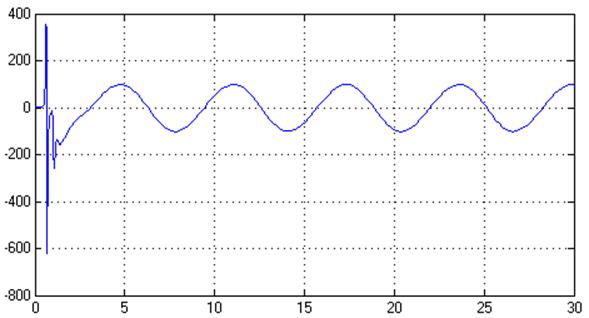
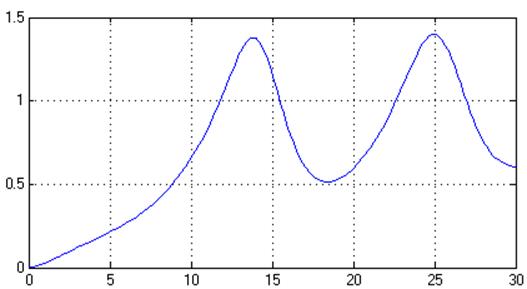
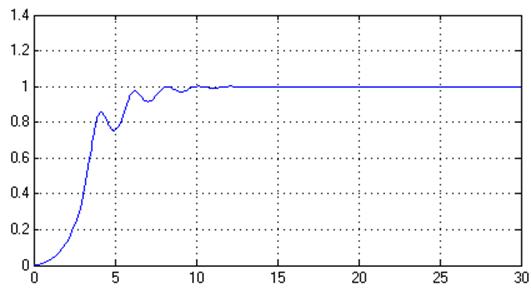
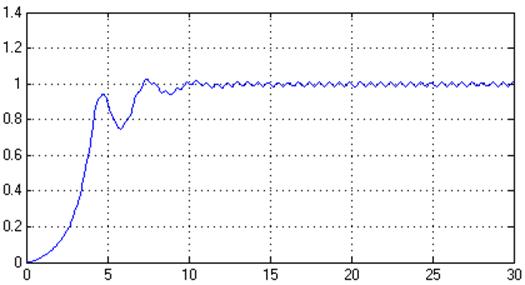
Рис. 23. Переходный процесс в системе, y(t) (% = 4%, tпп = 5,8 с)
.
![]()
 t
t
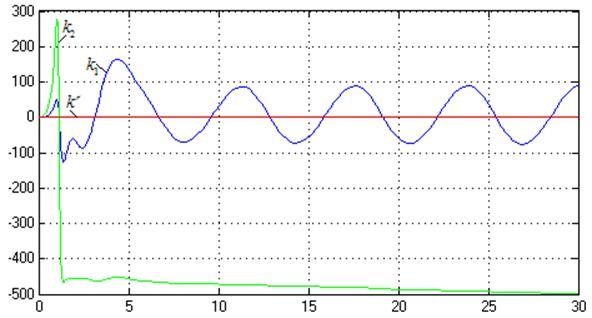
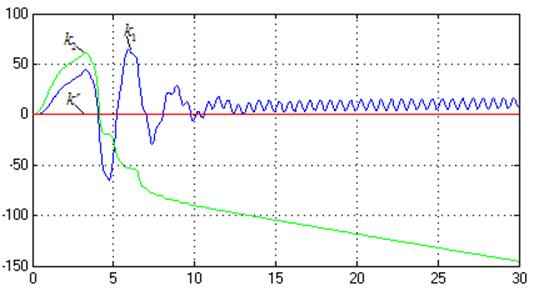
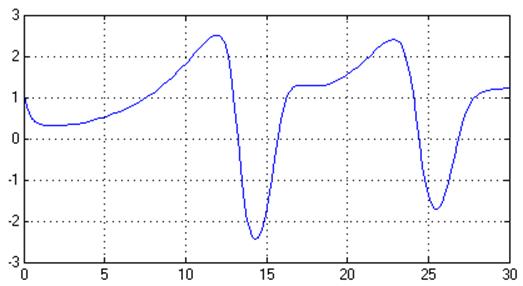
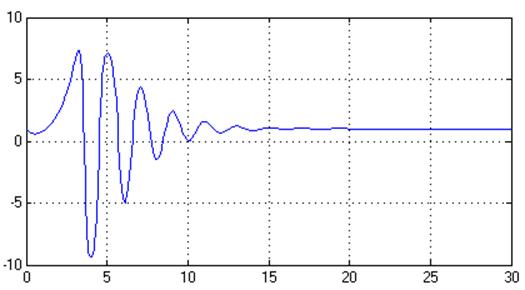
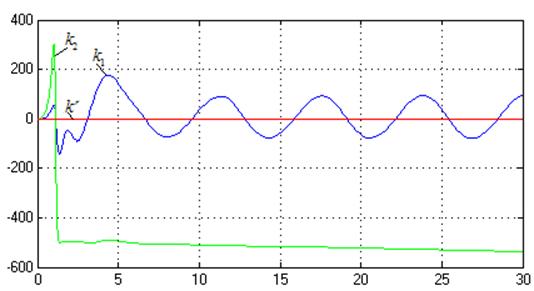
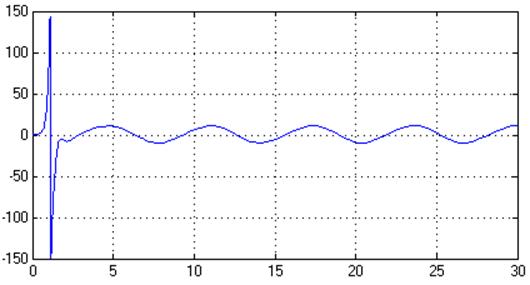
Рис.24. Процессы на
выходе адаптера ![]() ,
,![]() .
.
U
 t
t
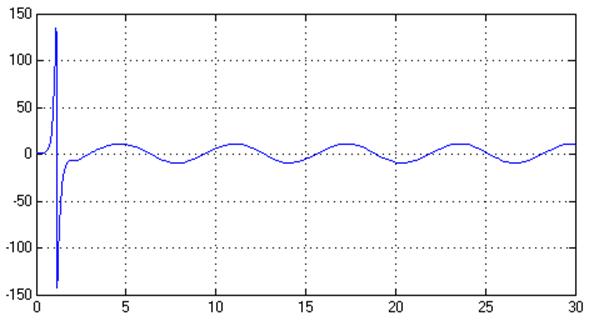
Рис.25. Управляющее воздействие, U(t)
б) ![]() =1,
=1,
![]() =10, γ1=150,
γ2=1
=10, γ1=150,
γ2=1
y
 t
t
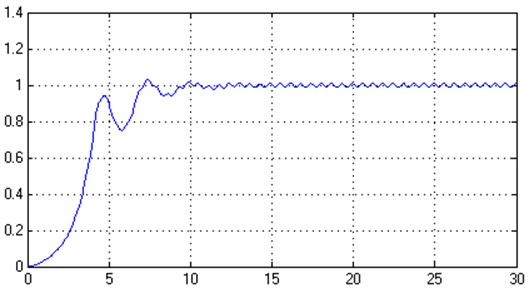
Рис. 26. Переходный процесс в системе, y(t) (% = 3%, tпп = 9 с)
.
![]()
 t
t
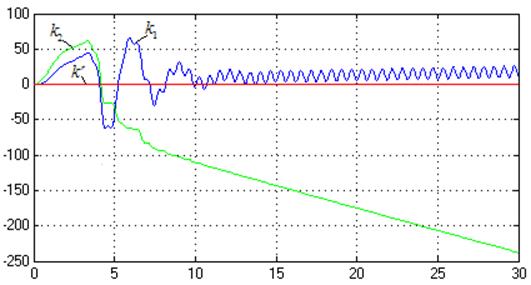
Рис.27. Процессы на выходе адаптера (![]() ,
,![]() ).
).
U
 t
t
Рис.28. Управляющее воздействие, U(t)
в) ![]() =10,
=10,
![]() =1, γ1=700,
γ2= 0.001
=1, γ1=700,
γ2= 0.001
y
 t
t
Рис.29. Переходный процесс в системе, y(t) (% = 4%, tпп = 5,4 с)
![]()
 t
t
Рис.30. Процессы на
выходе адаптера (![]() ,
,![]() ).
).
U
 t
t
Рис.31. Управляющее воздействие, U(t)
3.11 Собрать схему системы с наблюдателем. Выполнить исследования системы, повторив пп. 3.5, 3.6, 3,9.
пп 3.5.
y
 t
t
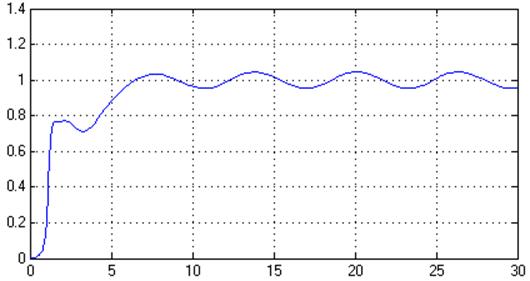
Рис. 32. Переходный процесс в адаптивной системе с наблюдателем, показатели качества являются не удовлетворительными.
U
 t
t
Рис. 33. Управляющее воздействие, U(t)
![]()
 t
t
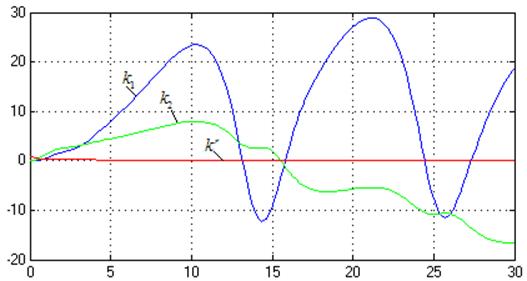
Рис. 34. Переходные
процессы ![]()
пп 3.6.
γ = 200, 200, 1
y
 t
t
Рис. 35. Переходный процесс в адаптивной системе с наблюдателем (% = 1%, tпп = 7,5 с)
U
 t
t
Рис. 36. Управляющее воздействие, U(t)
![]()
 t
t
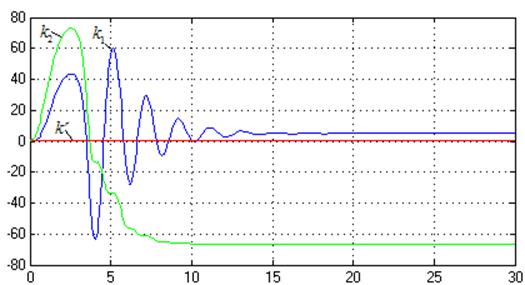
Рис. 37. Переходные
процессы ![]() (t1ппа=22
с, t2ппа=14 с, trппа=4,7
с)
(t1ппа=22
с, t2ппа=14 с, trппа=4,7
с)
пп 3.9
а) ![]() =1,
=1,
![]() =1, γ1=500,
γ2=0,1
=1, γ1=500,
γ2=0,1
y
 t
t
Рис. 38. Переходный процесс в системе, y(t) (% = 4,5%, tпп = 5,7 с)
![]()
 t
t
Рис.39.
Процессы на выходе адаптера (![]() ,
,![]() ).
).
U
 t
t
Рис.40. Управляющее воздействие, U(t)
б) ![]() =1,
=1,
![]() =10, γ1=150,
γ2=1
=10, γ1=150,
γ2=1
y
 t
t
Рис. 41. Переходный процесс в системе, y(t) (% = 3%, tпп = 9 с)
.
![]()
 t
t
Рис.42.
Процессы на выходе адаптера (![]() ,
,![]() ).
).
U
 t
t
Рис.43. Управляющее воздействие, U(t)
в) ![]() =10,
=10,
![]() =1, γ1=700,
γ2= 0.001
=1, γ1=700,
γ2= 0.001
y
 t
t
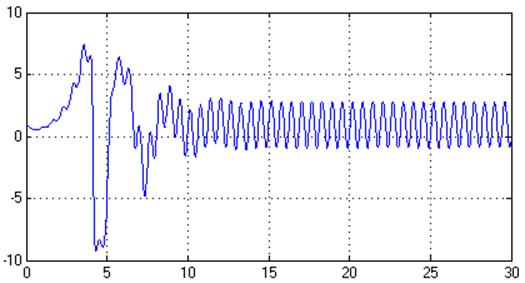
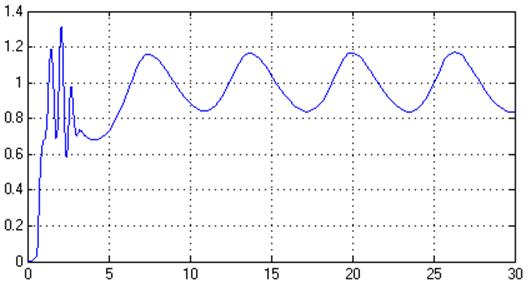
Рис.44. Переходный процесс в системе, y(t) не удовлетворяет желаемому
![]()
 t
t
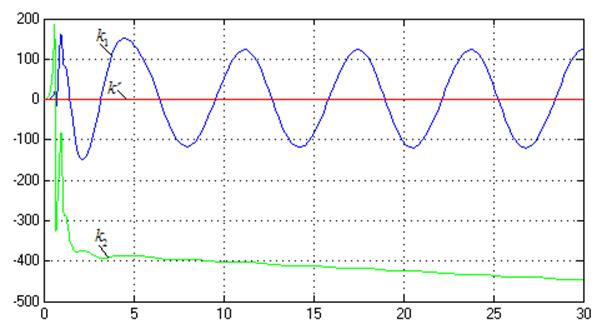
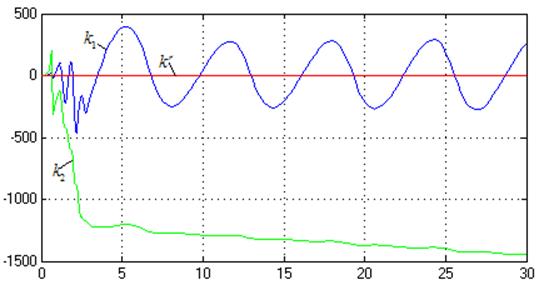
Рис.45. Процессы на
выходе адаптера (![]() ,
,![]() ).
).
t
U
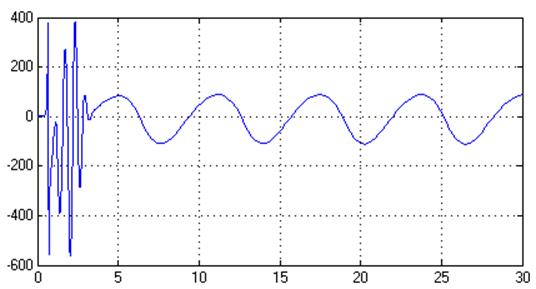 t
t
Рис.46. Управляющее воздействие, U(t)
Выводы:
1. В данной работе было проведено исследование свойств системы с алгоритмом адаптации на основе второго метода Ляпунова. По данным таблицы 1 были определены коэффициенты эталонного уравнения, далее вычислены элементы матрицы Н как решение уравнения Ляпунова и записаны уравнения алгоритмов адаптации с вычисленными значениями коэффициентов.
2.
Стационарный объект. При r(t)=1(t), нулевых начальных условиях, ![]() =10,
=10, ![]() =1, kr(0)=1 показатели качества переходного процесса не соответствуют
требуемым.
=1, kr(0)=1 показатели качества переходного процесса не соответствуют
требуемым.
3.
Далее были изменены значения ![]() :
:
При
![]() =200,
=200, ![]() =1 были обеспечены заданные показатели
качества: % = 1%, tпп = 7,7
с, t1ппа=22 с,
t2ппа=14 с,
trппа=4,7 с.
=1 были обеспечены заданные показатели
качества: % = 1%, tпп = 7,7
с, t1ппа=22 с,
t2ппа=14 с,
trппа=4,7 с.
4. Изменив начальные условия в объекте (![]() ,
,![]() ) также провели моделирование при
) также провели моделирование при ![]() =1,
=1, ![]() =1 и при
=1 и при
![]() =10,
=10, ![]() =1. В
первом и втором случае показатели качества не удовлетворяют заданные.
=1. В
первом и втором случае показатели качества не удовлетворяют заданные.
5.Также
изменяли последовательно параметры объекта в 2 раза(![]() =10,
=10, ![]() =1):
=1):
а) при a0 = 0,2, a1 = 0,5, b = 0,1: показатели качества являются не удовлетворительными.
б) при a0 = 0,1, a1 = 1, b = 0,1: показатели качества являются не удовлетворительными.
в) при a0 = 0,1, a1 = 0,5, b = 0,2: показатели качества являются не удовлетворительными.
Во всех случаях получили не удовлетворительные показатели качества
5. Нестационарный объект.
При нулевых начальных условиях необходимые качества процессов были
получены при увеличении ![]() и уменьшение
и уменьшение ![]() :
:
а) при ![]() =1,
=1, ![]() =1 были взяты
=1 были взяты ![]() =500
=500 ![]() =0,1 (% = 4%, tпп = 5,8
с);
=0,1 (% = 4%, tпп = 5,8
с);
б) при ![]() =1,
=1, ![]() =10 -
=10 -![]() =150,
=150, ![]() =1 (% = 3%, tпп = 9 с);
=1 (% = 3%, tпп = 9 с);
в) при ![]() =10,
=10, ![]() =1 -
=1 - ![]() =700,
=700, ![]() =0,001 (% = 4%, tпп = 5,4
с).
=0,001 (% = 4%, tпп = 5,4
с).
6. Наблюдатель состояния
6.1 При r(t)=1(t), нулевых начальных условиях, ![]() =10,
=10, ![]() =1, kr(0)=1 показатели качества переходного процесса не соответствуют
требуемым.
=1, kr(0)=1 показатели качества переходного процесса не соответствуют
требуемым.
6.2 При ![]() =200,
=200,
![]() =1 были обеспечены заданные показатели
качества: % =1%, tпп = 7,5
с, t1ппа=22 с,
t2ппа=14 с,
trппа=4,7 с
=1 были обеспечены заданные показатели
качества: % =1%, tпп = 7,5
с, t1ппа=22 с,
t2ппа=14 с,
trппа=4,7 с
6.3
а) при ![]() =1,
=1, ![]() =1 были взяты
=1 были взяты ![]() =500
=500 ![]() =0,1 (% = 4,5%, tпп = 5,7 с)
=0,1 (% = 4,5%, tпп = 5,7 с)
б) при ![]() =1,
=1, ![]() =10 -
=10 -![]() =150,
=150, ![]() =1 (% = 3%, tпп = 9 с);
=1 (% = 3%, tпп = 9 с);
в) при ![]() =10,
=10, ![]() =1 -
=1 - ![]() =700,
=700, ![]() =0,001 показатели
качества являются не удовлетворительными.
=0,001 показатели
качества являются не удовлетворительными.
Введение наблюдателя состояния приводит к ухудшению показателей качества переходных процессов в нестационарном объекте при увеличении амплитуды.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.