Планы скоростей и ускорений для крайних положений рассчитываются аналогично планам для положения q=60º.
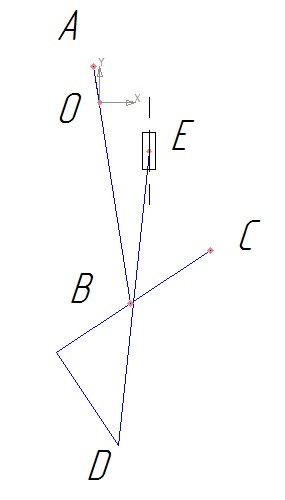
Рис. IV.4. Крайнее положение ![]() .
.
Рис.
IV.5. План
аналогов скоростей ![]() .
.
Рис.
IV.6. План
аналогов ускорений ![]()
|
План скоростей |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
![]()
Рис. IV.8. План аналогов скоростей q=30°.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. IV.9. План аналогов ускорений q=30°.
Механизм имеет одно крайнее положение, в котором скорость точки Е равна нулю. Это положение наблюдается при значении угла 52.5º. Ниже приведены планы скоростей и ускорений для этого положения. Планы скоростей и ускорений для крайнего положения рассчитываются аналогично планам для положения q=30º.
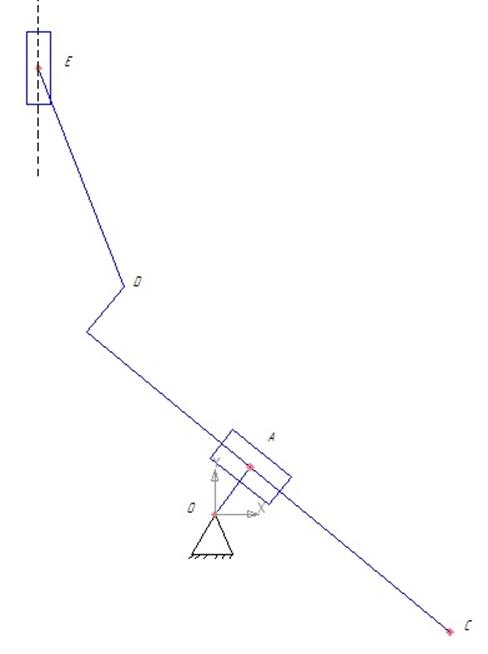
Рис. IV.10. Крайнее
положение ![]() .
.
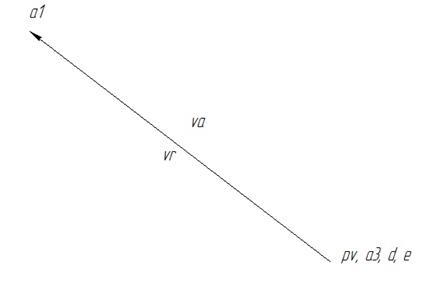
Рис. IV.11. План аналогов
скоростей ![]() .
.
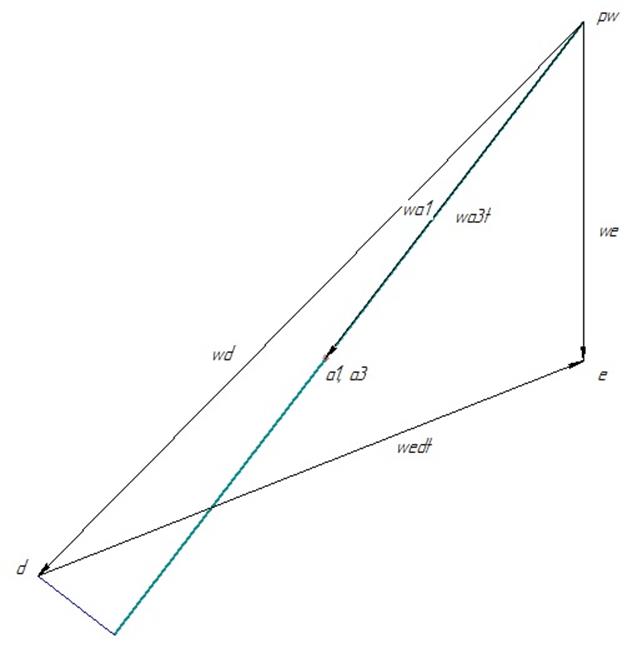
Рис. IV.12. План аналогов
ускорений ![]() .
.
Таблица IV.1
|
Протокол MathCAD |
Графический метод |
||
|
f2 |
-85.9039 |
-85.9039 |
|
|
f3 |
-141.5328 |
-141.5328 |
|
|
f4 |
87.2873 |
87.2873 |
|
|
xa |
0.0306 |
0.0306 |
|
|
ya |
0.053 |
0.053 |
|
|
xd |
0.0582 |
0.0582 |
|
|
yd |
-0.579 |
-0.579 |
|
|
xb |
0.059 |
0.059 |
|
|
yb |
-0.3438 |
-0.3438 |
|
|
ye |
-0.0899 |
-0.0899 |
|
|
Аналоги скоростей |
|||
|
f`2 |
0.0684 |
0.0684 |
|
|
f`3 |
-0.2612 |
-0.2612 |
|
|
f`4 |
-0.1785 |
-0.1785 |
|
|
Xa` |
-0.053 |
-0.053 |
|
|
Ya` |
0.0306 |
0.0306 |
|
|
Xd` |
-0.0873 |
-0.0873 |
|
|
Yd` |
0.0328 |
0.0328 |
|
|
Xb` |
-0.0259 |
-0.0259 |
|
|
Yb` |
0.0325 |
0.0325 |
|
|
Ye` |
0.0286 |
0.0286 |
|
|
Аналоги ускорений |
|||
|
f``2 |
0.2032 |
0.2032 |
|
|
f``3 |
0.4184 |
0.4184 |
|
|
f``4 |
0.3018 |
0.3018 |
|
|
Xa`` |
-0.0366 |
-0.0366 |
|
|
Ya`` |
-0.053 |
-0.053 |
|
|
Xd`` |
0.1484 |
0.1484 |
|
|
Yd`` |
-0.0297 |
-0.0297 |
|
|
Xb`` |
0.0499 |
0.0499 |
|
|
Yb`` |
-0.0454 |
-0.0454 |
|
|
Ye`` |
-0.0382 |
-0.0382 |
|
Таблица IV.2
|
Протокол MathCAD |
Графический метод |
||
|
f3 |
141.42 |
141.42 |
|
|
f4 |
110.024 |
110.024 |
|
|
xa |
0.025109 |
0.025109 |
|
|
ya |
0.0145 |
0.0145 |
|
|
xd |
-0.0473 |
-0.0473 |
|
|
yd |
0.109 |
0.109 |
|
|
u |
0.116 |
0.116 |
|
|
ye |
0.2183 |
0.2183 |
|
|
Аналоги скоростей |
|||
|
f`3 |
-0.0911 |
-0.0911 |
|
|
f`4 |
0.1399 |
0.1399 |
|
|
Xa` |
-0.0145 |
-0.0145 |
|
|
Ya` |
0.025 |
0.025 |
|
|
Xd` |
0.0152 |
0.0152 |
|
|
Yd` |
0.0149 |
0.0149 |
|
|
u` |
0.027 |
0.027 |
|
|
Ye` |
0.009316 |
0.009316 |
|
|
Аналоги ускорений |
|||
|
f``3 |
0.2745 |
0.2745 |
|
|
f``4 |
-0.4019 |
-0.4019 |
|
|
Xa`` |
-0.251 |
-0.251 |
|
|
Ya`` |
-0.0145 |
-0.0145 |
|
|
Xd`` |
-0.0446 |
-0.0446 |
|
|
Yd`` |
-0.046 |
-0.046 |
|
|
u`` |
0.0115 |
0.0115 |
|
|
Ye`` |
-0.0324 |
-0.0324 |
|
Из таблиц видно, что значения скоростей и ускорений, вычисленные разными методами, совпадают. На основании проведенных исследований окончательно выбираем для дальнейших расчетов второй прототип.
Основной задачей силового анализа является определение реакций в кинематических парах. Их значения необходимы, в дальнейшем, для расчета деталей на жесткость и прочность. Реакции определяются в положении, в котором действует максимальная нагрузка.
В ходе силового анализа также определяется движущий момент, который необходим для выбора двигателя механизма. Двигатель выбирается по максимальному движущему моменту и мощности. Движущий момент - тот момент, который необходимо приложить к кривошипу, для того чтобы вращать его с заданной постоянной скоростью при заданных рабочей нагрузке, силах тяжести и силах инерции.
Также необходимо оценить внутреннюю и внешнюю виброактивности механизма. Внешняя виброактивность определяется по главному вектору сил инерции. Ее можно уменьшить с помощью установки противовеса. Внутренняя виброактивность определяется по возмущающему моменту. Ее можно уменьшить с помощью установки разгружателей.
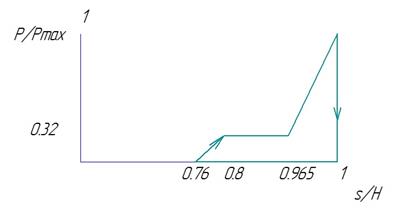
Рис.V.1. Индикаторная диаграмма.
Определение нагрузки:
|
|
|
|
|
|
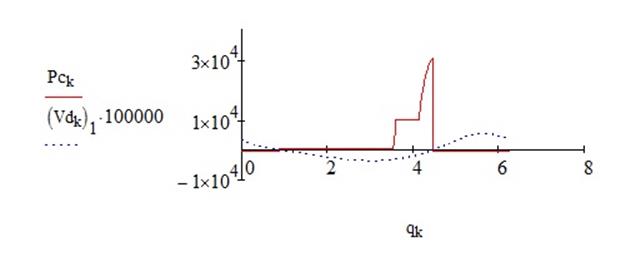
Рис.V.2. График зависимости вектора рабочей нагрузки от входной координаты.
Для определения масс звеньев механизма необходимо задать погонную массу.
Исходя из технического задания,
погонная масса ![]() .
.
Момент инерции звеньев относительно центра масс рассчитывается по формуле I=ml2/12, где m-масса звена, l-его длина.
Так же к каждому звену в центре масс приложены сила тяжести, рассчитывается по формуле G=m*g, где g = 9.8, ускорение свободного падения, m-масса каждого звена соответственно.
См. приложение-1 в MathCAD.
Силовой анализ механизма аналитическим методом проводят последовательно и отдельно для каждой структурной группы, начиная с той, в которую входит выходное звено. Начальное звено анализируют последним.
Для определения реакций в кинематических парах структурных групп и начального звена составляют и решают уравнения кинетостатики.
Составляем уравнения:
Звено 5:
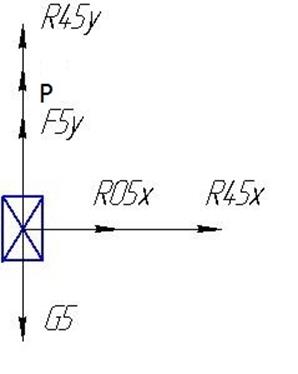
Условие равновесия звена 5:
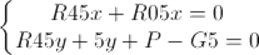
Звено 4:
Условие равновесия звена 4:

Условие равновесия звена 3:

Условие равновесия камня:

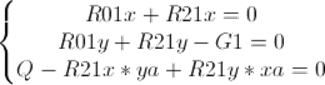
Условие равновесия кривошипа:
Сравнивая результаты расчета в Mathcad получаем одинаковые значения движущего момента в обоих случаях, значет вычисление были проведены верно
|
|
Рис. V.7. Движущий момент.
Графоаналитический метод заключается в построении планов сил и определении из них реакций. Т.к. планы сил не могут учитывать действующие на механизм моменты, то необходимо силы, найденные через уравнения моментов в аналитическом решении, принять как известные.
Каждое звено механизма находится в равновесии, следовательно все силы, приложенные к нему, будут уравновешивать друг друга.
![]()
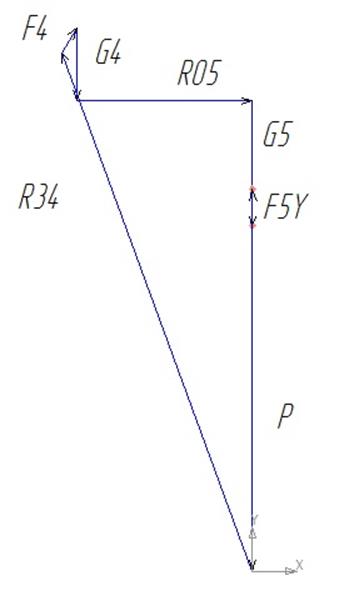
Рис. V.8. План сил, группа ВВП.
![]()
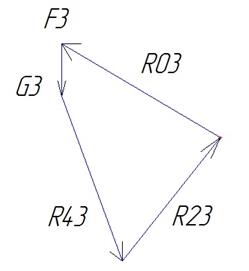
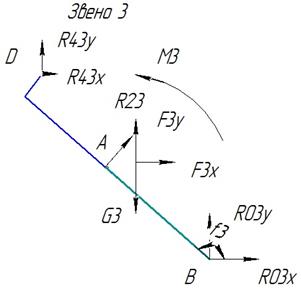
Рис. V.9. План сил звена 3.
![]()
![]()
![]()
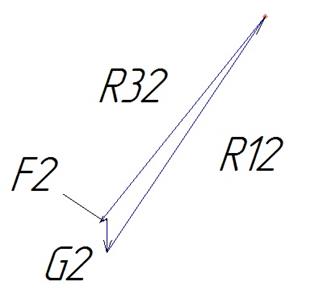
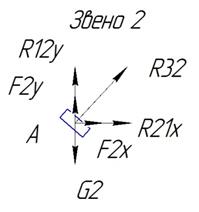
Рис. V.10. План сил звена 2.
![]()
![]()
![]()
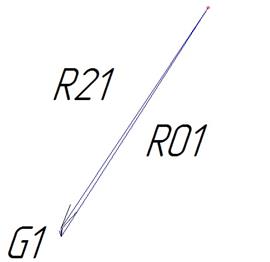
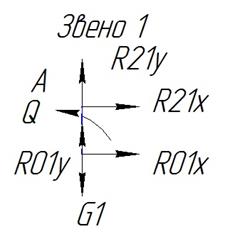
Рис. V.11. План сил, кривошип.
![]()
![]()
|
Аналитический метод |
Графоаналитический метод |
|
|
R34x |
|
|
|
R34y |
|
|
|
R05 |
138 |
138 |
|
R03x |
-390 |
-390 |
|
R03y |
231 |
231 |
|
R23 |
386.311 |
386.311 |
|
R12x |
|
|
|
R12y |
|
|
|
R01x |
|
|
|
R01y |
|
|
|
Q |
5.5 |
5.5 |
Мерой внешней виброактивности механизма при внутренней рабочей нагрузке является главный вектор сил инерции. В цикловых механизмах он является периодической функцией и может быть разложен в сходящийся ряд Фурье, представляющий собой сумму эллиптических гармоник:


Уравновесим первую гармонику сил инерции. Для этого нужно поставить два противовеса
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.