Целью данного курсового проекта является разработка надёжной микропроцессорной системы автоматической переездной сигнализации. В качестве контроллера был выбран микроконтроллер ADAM5510 производства фирмы Advantech.
Общая структурная схёма устройства приведена в приложении А, детальная структурная схема блока управления приведена в приложении Б.
Автоматическая переездная сигнализация (далее АПС) состоит из 3-х основных элементов.
· Модуль управления (У). Составляет ядро системы, реализует все логические зависимости, а также функции обеспечения безопасности. Представляет собой дублированную самопроверяемую систему.
· Модуль съема информации с путевых реле (К). Осуществляет контроль контактов путевого реле и передачу информации через линию связи в модуль управления.
· Модуль сигнализации (С). Осуществляет информирование дежурного по переезду о состоянии АПС по последовательному каналу связи.
Как видно из структурной схемы, АПС поддерживает контроль двух блок-участков (приближения и удаления).
Безопасность в системе АПС обеспечивается за счёт использования:
· импульсной работы приёмопередающей аппаратуры;
· надёжных и высокостабильных генераторов, трансформаторов со специально выполненными обмотками и сердечником;
· использованием самопроверяемой схемы внутреннего контроля, диагностирующей неисправности системы.
Данное устройство построено на базе двух контроллеров типа ADAM-5510 производства фирмы Advantech. Каждый модуль представляет собой универсальный PC совместимый микроконтроллер.
Каждый контроллер поддерживает до четырёх модулей ввода вывода. Конфигурирование производится в зависимости от финансовых возможностей заказчика. Однако для разрабатываемой системы требуется установка одного восьмиразрядного модуля ввода с гальванической развязкой типа ADAM-5052 и трех шестнадцатиразрядных модулей ввода-вывода типа ADAM-5050, первый из которых сконфигурирован на ввод, а остальные - на вывод информации. На рисунках 1 и 2 приведён внешний вид контроллера и модулей ввода-вывода.
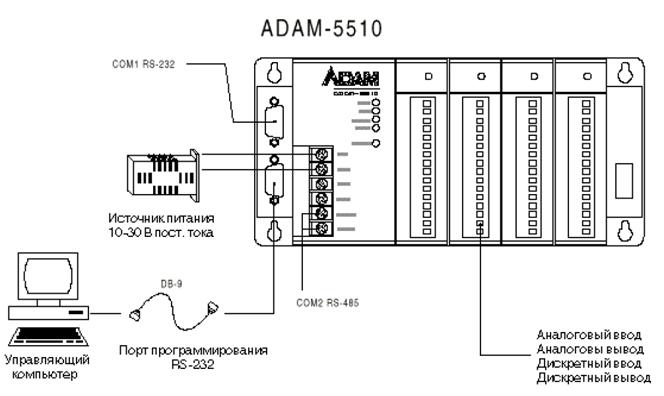
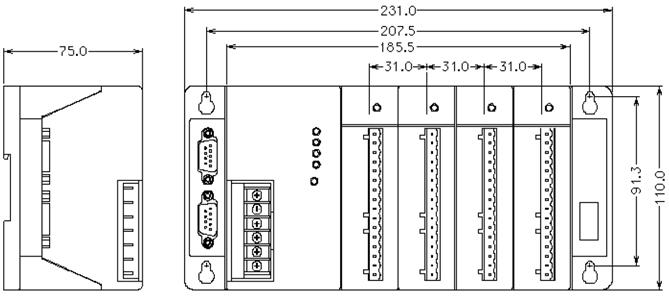
Рисунок 1 - Внешний вид контроллера ADAM-5510 и его габариты
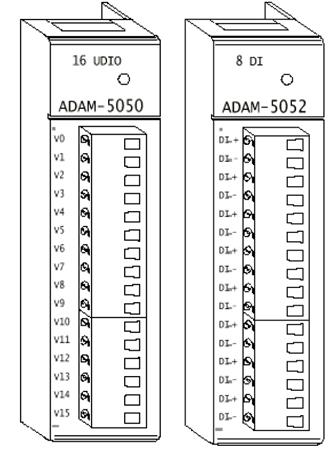
Рисунок 2 – Внешний вид модулей ввода-вывода
Модуль ADAM-5050 настраивается с помощью DIP-переключателей, на боковой стороне, для настройки на вывод, переключатель должен быть переведён в состояние включен (ON).
При этом в качестве входных можно использовать любые линии модуля ADAM-5052. т.к. во время процедуры инициализации контроллер сам определяет на каких его контактах находятся датчики. Выходной модуль конфигурируется таким образом, что на его выходах присутствует парафазный сигнал, т.е. 1010101.... или 0101010...., поэтому подключать выходные цепи можно на любые правильные выходы модуля. Модули в контроллере могут располагаться в произвольном порядке. Всё это сделано для исключения ошибок при монтаже и обслуживании оборудования.
Схема генератора гармонических колебаний (ГГК) приведена в приложении В.
Данный двухкаскадный ГГК выполнен на двух операционных усилителях типа К153УД1. Усилитель в первом каскаде включен по схеме с положительной обратной связью, а во втором с отрицательной. Использование двух инверсно включенных усилителей, позволяет добиться коэффициента гармоник близкого к 0,01. Таким образом характеристика генератора даёт возможность получать высокостабильные гармонические колебания.
Выбор частоты осуществляется с помощью подстроечных сопротивлений R1, R2, R7, и осуществляется при монтаже оборудования, с поправкой на температурные режимы работы.
Схема блока приведена в приложении Д.
Данный блок состоит из генератора, подключённого к фронтовому контакту путевого реле. Информация с контакта реле П поступает на согласующий трансформатор, а далее в линию связи.
Схема данного устройства приведена в приложении Ж.
Через блок согласования с линией подключаются к линии связи все приёмные и передающие устройства. Он представляет собой 2 трансформатора, необходимые для гальванической развязки входов контроллера.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.