Глава I. Общие принципы построения микроконтроллеров.
Контроллер (от английского control - управлять, регулировать) - это устройство, предназначенное для управления реальными объектами. Управление происходит во времени, поэтому говорят, что контроллер управляет объектом в реальном масштабе времени. Как всякое устройство управления, контроллер собирает исходную информацию, обрабатывает ее и формирует сигналы управления. Как правило, сигналы, несущие исходную информацию, и сигналы управления представляют собой аналоговые сигналы, такие, как напряжение, ток, магнитный и световой потоки, линейные и угловые перемещения и многое другое. Обработка этих сигналов может происходить как в аналоговой, так и в цифровой форме; последняя, в силу ее универсальности, находит в настоящее время повсеместное применение — контроллеры превращаются в аналого-цифровые устройства. Итак, современный контроллер — это цифровой вычислитель, связанный со средой управления аналого-цифровыми и цифроаналоговыми преобразователями.
В зависимости от сложности алгоритма управления цифровой вычислитель может быть построен в виде комбинационного устройства, автомата, операционного устройства или микропроцессорного вычислителя.
Выбор вида реализации вычислителя зависит также от трудоемкости и продолжительности проектирования контроллера, стоимости элементной базы, уровня технологического оснащения производства, требований потребителя и других факторов.
В последнее время наблюдается тенденция использования стандартного технического
оборудования (hardware), которое настраивается на решение конкретных задач
управления программными средствами (software). Это оборудование может быть
универсальным (ЭВМ, микроЭВМ, персональные компьютеры PC) или
специализированным (микроконтроллеры — МК). Если процессы управления не очень
сложны и не требуют большого объема памяти, высокой скорости вычислений и
разветвленной периферии, то большинство разработчиков отдают предпочтение
программно-управляемым микроконтроллерам. Как и большинство современных
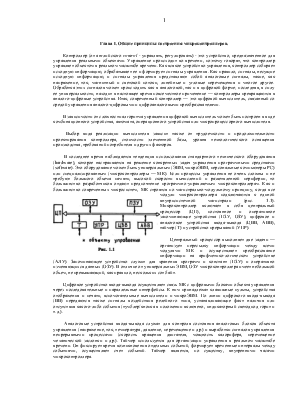
микросис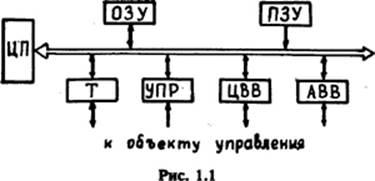 тем, МК строятся по
магистрально-модульному принципу, когда все модули микроконтроллера
подключаются к единой внутрисистемной магистрали (рис. 1.1). Микроконтроллер
включает в себя центральный процессор (ЦП), постоянное и оперативное
запоминающие устройства (ПЗУ, ОЗУ), цифровое и аналоговое устройства
ввода-вывода (ЦВВ, ABB), таймер (Т) и устройство прерываний (УПР).
тем, МК строятся по
магистрально-модульному принципу, когда все модули микроконтроллера
подключаются к единой внутрисистемной магистрали (рис. 1.1). Микроконтроллер
включает в себя центральный процессор (ЦП), постоянное и оперативное
запоминающие устройства (ПЗУ, ОЗУ), цифровое и аналоговое устройства
ввода-вывода (ЦВВ, ABB), таймер (Т) и устройство прерываний (УПР).
Центральный процессор выполняет две задачи — организует пересылку информации между всеми модулями МК и осуществляет преобразование информации на арифметико-логическом устройстве (АЛУ). Запоминающее устройство служит для хранения программ и констант (ПЗУ) и оперативно изменяющихся данных (ОЗУ). В отличие от универсальных ЭВМ, ОЗУ микроконтроллера имеет небольшой объем, не превышающий, как правило, нескольких сот байт.
Цифровое устройство ввода-вывода осуществляет связь МК с цифровыми блоками объекта управления через последовательные и параллельные интерфейсы. К ним принадлежат клавишные пульты, устройства отображения и печати, вспомогательные вычислители и микроЭВМ. По линии цифрового ввода-вывода (ВВ) передаются также сигналы воздействия релейного типа, устанавливающие факт наличия или отсутствия какого-либо события (тумблер/кнопка в положении включено, индикаторный светодиод горит и т.д.).
Аналоговые устройства ввода-вывода служат для контроля состояния аналоговых блоков объекта управления (напряжение, ток, температура, давление, перемещение и др.) и выработки сигналов управления непрерывными процессами (скорость вращения двигателя, мощность калорифера, перемещение механической заслонки и др.). Таймер используется для организации управления в реальном масштабе времени. Он фиксирует время возникновения отдельных событий, формирует временные интервалы между событиями, осуществляет счет событий. Таймер является, по существу, внутренними часами микроконтроллера.
Устройство прерывания оптимизирует процесс управления с учетом возникновения непредсказуемых событий: изменяет процесс обмена и обработки данных, фиксирует и исправляет сбои, восстанавливает работоспособность МК при кратковременном пропадании питания и многое другое.
При построении микроконтроллеров могут использоваться самые различные наборы микропроцессорных БИС — от универсальных БИС микропроцессоров, памяти и интерфейсов ввода-вывода до однокристальных ЭВМ. Последние были специально разработаны для работы в МК и поэтому получили название однокристальных микроконтроллеров (ОМК).
Построение МК на микропроцессорных БИС и однокристальных микроконтроллерах заметно отличается друг от друга. В качестве микропроцессорных БИС чаще всего используются n-канальные БИС серии КР580, КР1810 и КР1821, которые и положены в основу одноплатных микроконтроллеров серии мМС1200 и ММС1212 [5, 6].
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.