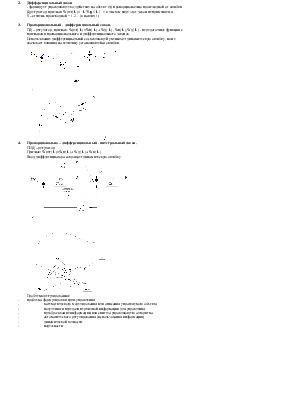
Вопрос №14 Законы автоматического регулирования турбины
Закон регулирования – алгоритм или функциональная зависимость в соответствии с которым управляющие устройство формирует управляющее воздействие r(t).
r(t)=F(ε,g,t)=F1(ε)+F2(g)+F3(t)
ε– ошибка регулирования
F(ε) – регулирование по отклонению
Законы регулирования можно представить в виде передаточной функции Wрег(λ)
Простейший закон регулирования:
Wрег(λ)- передаточная функция РО
Wор(λ) - передаточная функция ОР
Представим систему как прямую, еденичное ступенчатое воздействие
1. Пропорциональный закон регулирования
- формирует управляющее воздействие на объект r(t) пропорционально ошибке регулирования. Регулятор обозначается П-регулятор
Признак П-регулятора LimWрег(λ)=К
К - к-нт передачи цепи регулирования, не равен 0 и бесконечности
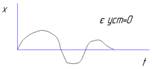
Характерной особенностью системы с пропорциональным законом является наличие ненулевой ошибки регулирования εуст не равно 0, кроме того система имеет колебательный переходный процесс
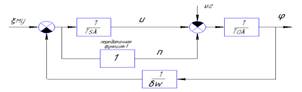
1. Интегральный закон регулирования.
- формирует управляющее воздействие на объект r(t) пропорционально интегралу от ошибки регулирования. Регулятор обозначается И-регулятор.
Признак И-регулятора Wрег(λ)=1/λs·Wп(λ)
Где S=1,2… порядок астатизма регулятора, Wп - передаточная функция с признаком пропорционального закона регулирования.
Характерной особенностью системы с интегральным законом регулирования явл. то, что ε уст=0.
Такая система имеет недостаточный запас устойчивости и более того может стать не устойчивой.
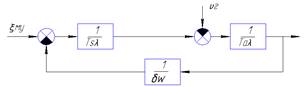
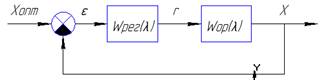
![]()
Wрег(λ)=1/δw·1/Тsλ=1/λ·1/δw·1/Ts- Wп- система явл. структурно неустойчивой
Наша задача! Получить устойчивую систему с нулевой ошибкой.
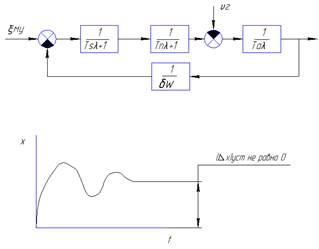
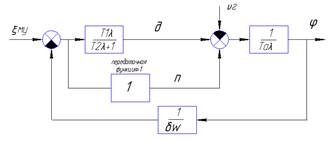
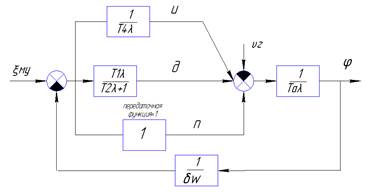
1. Пропорциональный - Интегральный закон регулирования
ПИ-регулятор – реагирует по пропорциональному и интегральному закону
Признак: Wрег(λ)=Wп(λ)+ Wи(λ); Wи(λ), Wп(λ) – передаточные функции с признаками интегрального и пропорционального законов
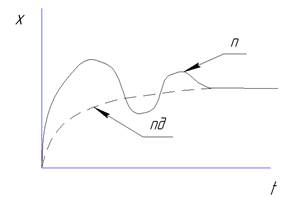
Ввод интегрального закона часто приводит к потери устойчивости системы, применение ПИ-закона позволяет получить достаточный запас устойчивости и добиться нулевой установившейся ошибки регулирования.
так будет выглядеть переходная ф-ия с 0-ой ошибкой – устойчивая система

2. Дифференциальный закон
- формирует управляющее воздействие на объект r(t) пропорционально производной от ошибки
Д-регулятор, признак: Wрег(λ)= λsWп(λ) – в чистом виде этот закон не применяется.
S – степень производной = 1,2… (в наших 1)
3. Пропорциональный - дифференциальный закон.
ПД – регулятор, признак: Wрег(λ)=Wп(λ)+ Wд(λ), Wп(λ),Wд(λ) - передаточные функции с признаками пропорционального и дифференциального законов.
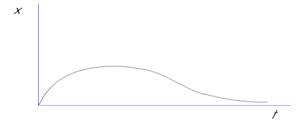
Использование дифференциальной составляющей уменьшает динамическую ошибку, но не оказывает влияния на величину установившейся ошибки.
4. Пропорционально – дифференциальный - интегральный закон.
ПИД – регулятор.
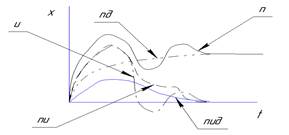
Признак: Wрег(λ)=Wп(λ)+ Wд(λ)+ Wи(λ)
Ввод дифференциатора сокращает динамическую ошибку.
Проблемы регулирования:
- проблема формулировки цели управления
- математического моделирования или описания управляемого объекта
- получения и передачи первичной информации для управления
- преобразование информации или синтеза управляющего алгоритма
- автоматического регулирования (использования информации)
- динамической точности
- надежности
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.