![]()
Принимаем ![]()
2.4. Профилирование кулачка.
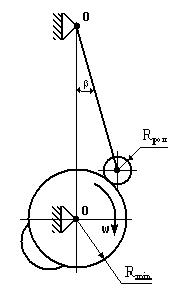
Проводим методом
обращения движения: мысленно придаем всему механизму, т.е. кулачковой шайбе,
коромыслу и стойке вращение вокруг центра кулачка с угловой скоростью – ![]() кулачка равной по абсолютной
величине угловой скорости кулачка, но противоположно направленной. Тогда
угловая скорость кулачка становится равной
кулачка равной по абсолютной
величине угловой скорости кулачка, но противоположно направленной. Тогда
угловая скорость кулачка становится равной ![]() ,
т.е. кулачек неподвижен. Коромысло перемещается, кроме своего абсолютного
движения приобретает добавочное движение вращения вокруг оси кулачка с угловой
скоростью –
,
т.е. кулачек неподвижен. Коромысло перемещается, кроме своего абсолютного
движения приобретает добавочное движение вращения вокруг оси кулачка с угловой
скоростью – ![]() . При этом точка
. При этом точка ![]() его подвеса перестает оставаться
неподвижной. Она описывает в обращенном движении окружность радиусом
его подвеса перестает оставаться
неподвижной. Она описывает в обращенном движении окружность радиусом ![]() в направлении, обратном абсолютному
вращению кулачка, а центр ролика
в направлении, обратном абсолютному
вращению кулачка, а центр ролика ![]() кроме перемещения
по дуге радиусом
кроме перемещения
по дуге радиусом ![]() получает добавочное в
каждый момент времени вращение вокруг центра
получает добавочное в
каждый момент времени вращение вокруг центра ![]() .
При этом его относительное расположение в системе не нарушается.
.
При этом его относительное расположение в системе не нарушается.
Следовательно, метод
обращенного движения позволяет при проектировании рассматривать вместо
абсолютного движения коромысла его движение относительно кулачка. Кулачок
становится неподвижным звеном. Строим треугольник ![]() со
сторонами
со
сторонами ![]() в масштабе
в масштабе ![]() .
Радиусом
.
Радиусом ![]() проводим дугу
проводим дугу ![]() , которая стягивает угол
, которая стягивает угол ![]() . Эту дугу делим на части,
пропорциональные ординатам диаграммы перемещения
. Эту дугу делим на части,
пропорциональные ординатам диаграммы перемещения ![]() . В
сторону, противоположную вращению кулачка от
. В
сторону, противоположную вращению кулачка от ![]() откладываем
углы jн.в.=1800,
jу=900,
jв=450,
jв.в.=450.
Дуги, стягивающие угол удаления и угол возврата делим соответственно на 8 и на
4 равные части. Из точек
откладываем
углы jн.в.=1800,
jу=900,
jв=450,
jв.в.=450.
Дуги, стягивающие угол удаления и угол возврата делим соответственно на 8 и на
4 равные части. Из точек ![]() проводим дугу до
пересечения с линиями
проводим дугу до
пересечения с линиями![]() Получаем точки 17',18',…
Соединяем плавной кривой
Получаем точки 17',18',…
Соединяем плавной кривой ![]() … Получаем
теоретический профиль кулачка. Практический (рабочий) профиль кулачка получим
как огибающую семейства окружностей, проведенных из центров, расположенных на
теоретическом профиле кулачка радиусом ролика
… Получаем
теоретический профиль кулачка. Практический (рабочий) профиль кулачка получим
как огибающую семейства окружностей, проведенных из центров, расположенных на
теоретическом профиле кулачка радиусом ролика ![]() Нижняя
касательная к данному семейству окружностей будет являться рабочим профилем
данного кулачкового механизма.
Нижняя
касательная к данному семейству окружностей будет являться рабочим профилем
данного кулачкового механизма.
Графическая часть см. рис. 2.3.
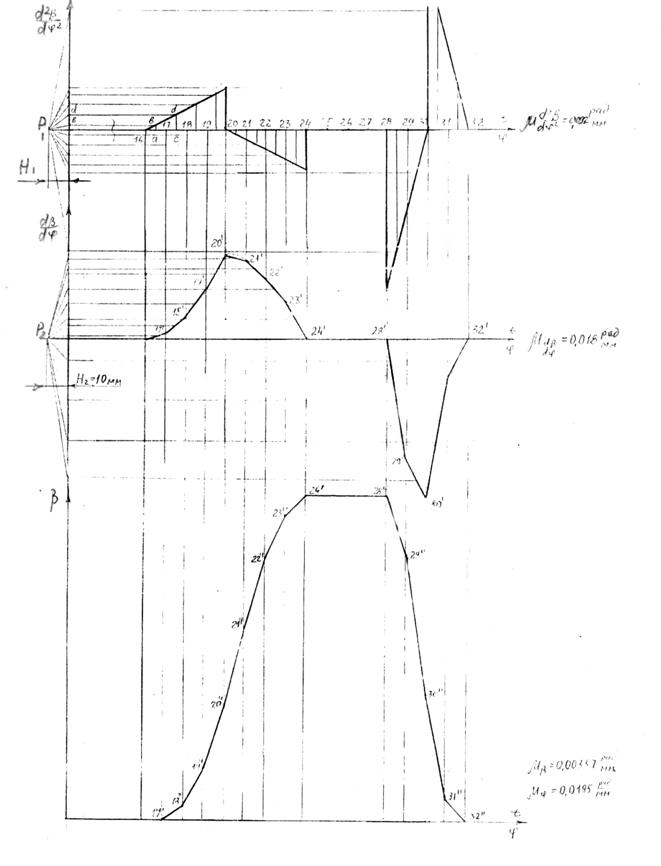
Рис. 2.2.
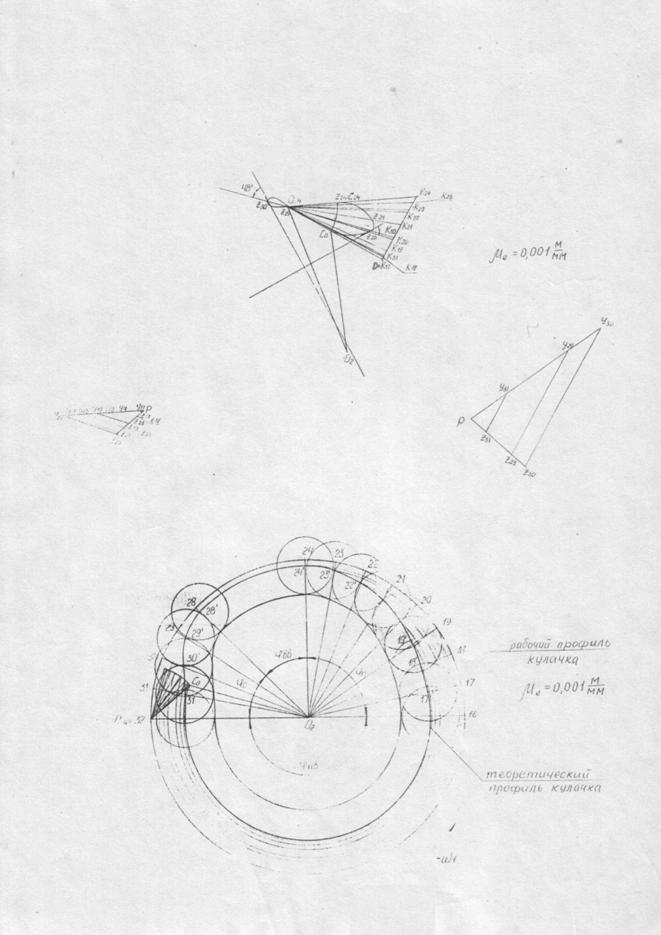
Рис. 2.3
2б Динамический синтез плоского кулачкового механизма с толкателем.
 Дано:
Дано:
![]() =44мм;
=44мм;
е=0;
![]() ;
;
![]() ;
;
![]() ;
;
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.