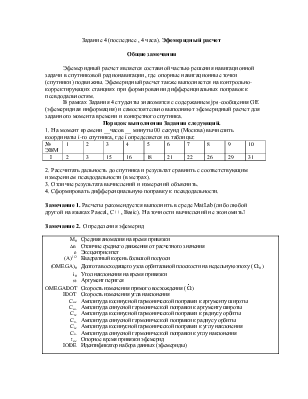

Задание 4 (последнее , 4 часа). Эфемеридный расчет
Общие замечания
Эфемеридный расчет является составной частью решения навигационной задачи в спутниковой радионавигации, где опорные навигационные точки (спутники) подвижны. Эфемеридный расчет также выполняется на контрольно-корректирующих станциях при формировании дифференциальных поправок к псевдодальностям.
В рамках Задания 4 студенты знакомятся с содержанием jps-сообщения GE (эфемеридная информация) и самостоятельно выполняют эфемеридный расчет для заданного момента времени и конкретного спутника.
Порядок выполнения Задания следующий.
1. На момент времени __часов __ минуты 00 секунд (Москва) вычислить координаты i-го спутника, где i определяется из таблицы:
|
№ ЭВМ |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
|
I |
2 |
3 |
15 |
16 |
18 |
21 |
22 |
26 |
29 |
31 |
2. Рассчитать дальность до спутника и результат сравнить с соответствующим измерением псевдодальности (в метрах).
3. Отличие результата вычислений и измерений объяснить.
4. Сформировать дифференциальную поправку к псевдодальности.
Замечание 1. Расчеты рекомендуется выполнить в среде MatLab (либо любой другой на языках Pascal, C++, Basic). На точности вычислений не экономить!
Замечание 2. Определения эфемерид
|
M0 Средняя аномалия на время привязки Dn Отличие среднего движения от расчетного значения e Эксцентриситет (A)1/2 Квадратный корень большой полуоси (OMEGA)0 Долгота
восходящего узла орбитальной плоскости на недельную эпоху ( i0 Угол наклонения на время привязки w Аргумент перигея OMEGADOT Скорость
изменения прямого восхождения ( IDOT Скорость изменения угла наклонения Cuc Амплитуда косинусной гармонической поправки к аргументу широты Cus Амплитуда синусной гармонической поправки к аргументу широты Crc Амплитуда косинусной гармонической поправки к радиусу орбиты Crs Амплитуда синусной гармонической поправки к радиусу орбиты Cic Амплитуда косинусной гармонической поправки к углу наклонения Cis Амплитуда синусной гармонической поправки к углу наклонения toe Опорное время привязки эфемерид IODE Идентификатор набора данных (эфемериды) |
Замечание 3. Элементы временных вычислений.
Время излучения сигнала
t=tGPS-tRANGE,
где tGPS – GPS-время из сообщения GT (в секундах),
tRANGE – псевдодальность (сек) из сообщения RC.
Cдвиг временной шкалы спутника
![]() ,
,
af0, af1, af2 и toc, содержатся в сообщении GE.
Системное время GPS (без учета поправок на релятивистские эффекты и групповую задержку)
tS=t-∆tSV
Замечание 4. Элементы координатных вычислений.
|
|
Большая полуось |
||
|
|
Расчетное среднее движение - радиан/секунда |
||
|
tk = tS - toe |
Время от опорной эпохи эфемерид* |
||
|
n = n0 +Dn*π |
Скорректированное среднее движение |
||
|
|
Средняя аномалия |
||
|
|
Уравнение Кеплера для эксцентрической аномалии (может быть решено итерациями) итерациями. Для 0-й итерации Ek=Mk) |
||
|
|
|||
|
Fk = nk + ω*π |
Аргумент широты |
||
|
Возмущения второй гармоники |
|||
|
duk = Cus sin 2fk + Cuc cos 2fk |
Коррекция аргумента широты |
||
|
drk = Crc cos 2fk + Crs sin 2fk |
Коррекция радиуса |
||
|
dik = Cic cos 2fk + Cis sin 2fk |
Коррекция наклонения |
||
|
uk = Fk + duk |
Скорректированный аргумент широты |
||
|
|
Скорректированный радиус |
||
|
|
Скорректированное наклонение |
||
|
|
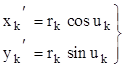
Координаты в орбитальной плоскости |
||
|
|
Скорректированная долгота восходящего узла |
||
|
|
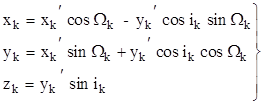
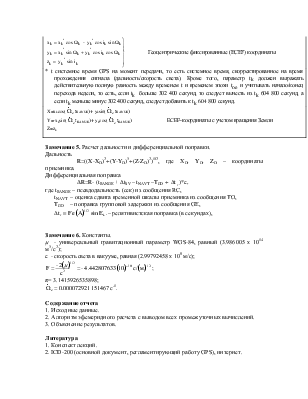
Геоцентрические фиксированные (ECEF) координаты |
||
|
* t системное время GPS на момент передачи, то есть системное время, скорректированное на время прохождения сигнала (дальность/скорость света). Кроме того, параметр tk должен выражать действительную полную разность между временем t и временем эпохи toe и учитывать начало/конец перехода недели, то есть, если tk больше 302 400 секунд, то следует вычесть из tk 604 800 секунд, а если tk меньше минус 302 400 секунд, следует добавить к tk 604 800 секунд. |
|||
|
X=xkcos( Y=-xksin( Z=zk |
|||
Замечание 5. Расчет дальности и дифференциальной поправки.
Дальность
R=((X-XO)2+(Y-YO)3+(Z-ZO)2)1/2, где XO, YO, ZO – координаты приемника.
Дифференциальная поправка
ΔR=R- (tRANGE
+ ∆tSV – tNAVT –TGD + ![]() )*c,
)*c,
где tRANGE – псевдодальность (сек) из сообщения RC,
tNAVT – оценка сдвига временной шкалы приемника из сообщения ТО,
TGD – поправка групповой задержки из сообщения GE,
![]() – релятивистская поправка (в секундах),
– релятивистская поправка (в секундах),
Замечание 6. Константы.
m - универсальный гравитационный параметр WGS-84, равный (3.986005 x 1014 м3/с2);
c - скорость света в вакууме, равная (2.99792458 x 108 м/с);

π= 3.1415926535898;
![]() =
0.000072921151467 с-1.
=
0.000072921151467 с-1.
Содержание отчета
1. Исходные данные.
2. Алгоритм эфемеридного расчета с выводом всех промежуточных вычислений.
3. Объяснение результатов.
Литература
1. Конспект лекций.
2. ICD-200 (основной документ, регламентирующий работу GPS), интернет.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.

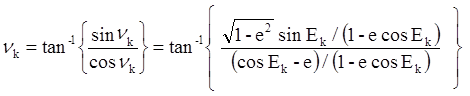 Истинная
аномалия
Истинная
аномалия