огибающей (пиковый детектор), затем в фильтр частоты сканирования, после
которого сигнал поступает на два квадратурных фазовых детектора: угла
места, азимута. При рассмотрении только одного углового канала,
максимальное значение полезного сигнала в канале управления
![]() , (5.3)
, (5.3)
где ![]() - коэффициент передачи фильтра частоты сканирования
- коэффициент передачи фильтра частоты сканирования
(![]() ≈ 0,7-0,9);
≈ 0,7-0,9); ![]() - коэффициент передачи
фазового детектора,
- коэффициент передачи
фазового детектора,
γ - угловое положение цели.
Выражение (5.3) позволяет определить крутизну пеленгационной
характеристики
![]() . (5.4)
. (5.4)
Основная мощность шума на выхода детектора огибающей сосредоточена
в области частот 0 - ![]() . Учитывая, что период
следовании импульсов
. Учитывая, что период
следовании импульсов ![]()
значительно меньше периода сканирования, спектральную мощность шума в полосе фильтра частоты сканирования можно считать постоянной и равной
![]() . При этом уровень
возмущающего воздействия (белого
. При этом уровень
возмущающего воздействия (белого
шума), отнесенного к входу системы, будет иметь следующий вид
![]() . (5.5)
. (5.5)
После подстановки (5.4) в (5.5) окончательно получим
![]() , (5.6)
, (5.6)
где n - отношение сигнал/шум на выходе УПЧ.
Как уже отмечалось, для осуществления линейного детектирования в
ПРМ с «сильным» сигналом необходимо обеспечить на выходе УПЧ
n ≥ 3÷4.
Выражения (5.1), (5.2) позволяют определить необходимую для этого
мощность ПРД

Полученные значения крутизны пеленгационной
характеристики ![]() ,
,
уровня помехи Nш и данные о входном воздействии, его производной и ускорении, о чем студентам специальности 210304(201600) известно из курса «Радиоавтоматика», позволяют произвести динамический синтез всей
системы АСН и рассчитать ошибки углового сопровождения.
5.2 Моноимпульсные системы АСН
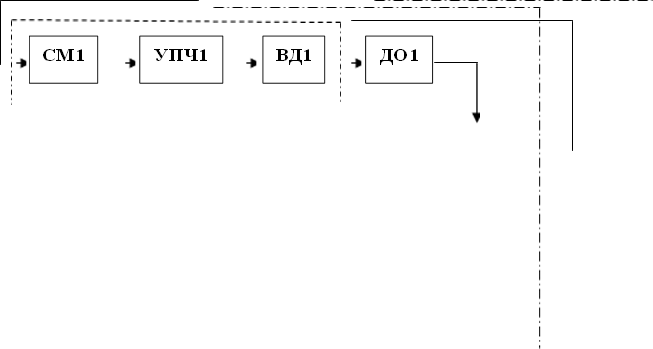
Функциональная схема одного из каналов амплитудно-амплитудной системы АСН изображена на рисунке 5.3.
В рассматриваемую систему АСН входят следующие устройства:
- пеленгационное устройство, содержащее два идентичных приемных канала ( смеситель - СМ, усилитель промежуточной частоты - УПЧ,
видеодетектор - ВД, детектор огибающей - ДО, антенну - А, гетеродин - Г
![]()
![]()
![]()
![]()
![]() От
канала азимута
От
канала азимута
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
 I А
I А
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() γ0
γ0
![]()
![]()
![]()
![]()
![]() γ0
γ0
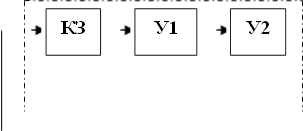
II Исполнительное устройство
 |
||
U Усилительно-преобразующее
![]()
![]() устройство
устройство
 |
![]()
![]()
![]()
 Приемник 1 uI
Приемник 1 uI
![]()
![]()
 Uстр
Uстр
![]()
![]()
![]()
![]()
![]()



 Δu
Δu
![]()
![]()
![]()
![]()
![]() uII
uII
![]() Приемник 2
Приемник 2
![]() Пеленгационное устройство
Пеленгационное устройство
Рисунок 5.3 - Амплитудно-амплитудная моноимпульсная система
 |
|||||
![]() Пеленгационное
Усилительно-преобразующее устройство
Пеленгационное
Усилительно-преобразующее устройство
устройство
![]()

![]()
 x
uк uУ1 uУ2
x
uк uУ1 uУ2
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() υвх
υвх
 |
|||||
![]()
![]() υвых υдв
υвых υдв
![]()
![]()
![]() uдв
uдв
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.