Глава 1. ПРИНЦИПЫ НАВИГАЦИИ И МЕТОДЫ РЕАЛИЗАЦИИ РАДИОНАВИГАЦИОННЫХ СИСТЕМ
И УСТРОЙСТВ
1.1. Виды радионавигационных систем
1.1.1. Классификация РНС
Основными классификационными признаками радионавигационных устройств и систем являются назначение, степень автономности, характер принимаемого сигнала и вид измеряемого навигационного элемента W. Кроме того, по виду информативного параметра сигнала различают амплитудные, частотные, фазовые и временные (импульсные) устройства и системы.
В радионавигации по назначению различают РНС системы посадки, ближней, дальней и глобальной навигации [2].
По степени автономности различают автономные и неавтономные системы и устройства.
Похарактеру принимаемого сигнала различают активные, пассивные и многопозиционные устройства и системы.
Активные устройства и системы извлекают информацию из отраженного сигнала. При этом передатчик Прд и приемник Прм данного устройства или системы находятся на одном объекте О (рис. 1.1).
Такое построение системы облегчает обработку принимаемого сигнала, так как последний в измерителе Изм может быть непосредственно подвергнут сравнению с излучаемым сигналом, формируемым блоком БФС. В активных системах излучаемый сигнал часто называют зондирующим.
Пассивная система предназначена для получения информации либо из сигнала, специально вырабатываемого другим объектом или наземной радиостанцией (рис. 1.2), либо из электромагнитных колебаний, излучаемых этим объектом.
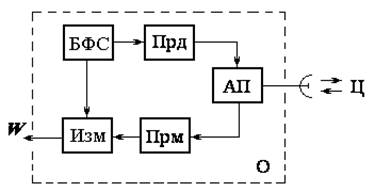 |
АП – антенный переключатель; Ц – цель;
БФС – блок формирования сигнала
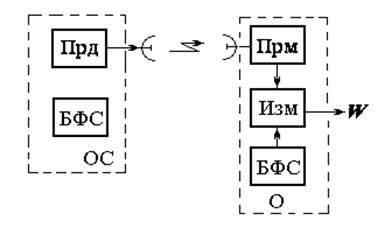 |
ОС – опорная станция; О – объект; Изм – измеритель
Последний метод используется в пассивных РЛС для определения положения источника излучения. На основе пассивных систем строится и большинство радиосистем дальней навигации (РСДН). Особенностью пассивных РНС является сложность измерения информативного параметра сигнала, так как для этого необходимо иметь на объекте точную копию сигнала, излучаемого другим объектом.
Повиду измеряемого навигационного элементаразличают угломерные, дальномерные и разностно-дальномерные устройства, а также устройства измерения скорости.
Угломерные устройства определяют угол в горизонтальной aили вертикальной bплоскости или в системе координат, связанной с объектом, и подразделяются на радиомаячные и радиопеленгационные.
Радиомаячными называют устройства, включающие в себя радиомаяк (обычно наземный), формирующий электромагнитное поле, параметры которого зависят от угловых координат точки приема. К радиопеленгационным устройствам (радиопеленгаторам) относят устройства, которые позволяют найти угловые координаты источника излучения электромагнитных колебаний по результатам измерения направления прихода радиоволн.
Дальномерные устройства (радиодальномеры) предназначены для измерения расстояния от одного объекта до другого Д. Различают радиодальномеры двух типов. Устройства первого типа являются основой пассивных РНС, в которых местоположение объекта находят, измеряя дальность по сигналам нескольких опорных станций. Радиодальномеры второго типа используют собственный сигнал, который отражается от другого объекта. Такие устройства применяются для нахождения высоты полета летательного аппарата (радиовысотомеры). Ко второму типу относятся и радионавигационные дальномеры, реализующие принцип «запрос–ответ», когда дальнометрия производится по сигналу радиодальномера, ретранслируемому другим объектом.
Разностно-дальномерные устройства позволяют найти элемент ДD=Д1-Д2, где Д1и Д2 – расстояние до объекта от двух передающих радиостанций, путем сравнения информативных параметров сигналов, принимаемых от этих радиостанций. Такие устройства наиболее часто используются при построении РНС.
1.1.2. Автономные и неавтономные РНС
Автономные системы и устройства измеряют навигационные элементы Wбез помощи радиолинии, связывающей бортовую аппаратуру данного объекта с внешними по отношению к нему радиоэлектронными устройствами. В таких системах реализуется радиолокационный принцип, т.е. информация об элементах Wизвлекается из отраженного от земной поверхности сигналов. К этому классу относятся однолучевые и многолучевые доплеровские
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.