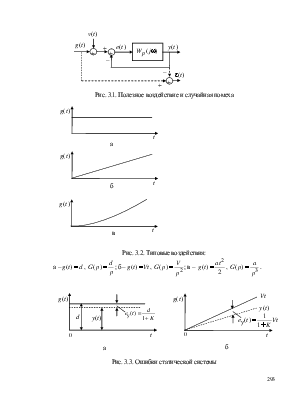
Рис. 3.1. Полезное воздействие и случайная помеха
Рис. 3.2. Типовые воздействия:
а –![]() ,
,
 ; б –
; б –![]() ,
,  ; в –
; в –  ,
,  .
.
Рис. 3.3. Ошибки статической системы
Рис. 3.4. Распределение вероятности ошибки дискретизации
|
Рис. 3.5. Дискретизация случайного процесса
Рис. 3.6. Расчет флюктуационной ошибки
3
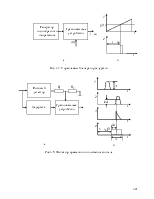
Рис. 3.7. Влияние постоянной времени ![]() на полосу пропускания
на полосу пропускания
Рис. 3.8. Исследование влияния случайного воздействия на систему
|
|
Рис. 3.9. Формирующие фильтры для процессов: а – винеровского; б – с винеровской скорстью; в – дискретный эквивалент процесса с винеровской скоростью.
Рис. 3.10. Формирующие фильтры для процессов: а – экспоненциально-коррелированного; б – с экспоненциально-коррелированной скоростью; в – дискретного экспоненциально-коррелированного; г – дискретного с экспоненциально-коррелированной скоростью.

Рис. 3.11. Анализ ошибок непрерывной системы при случайном воздействии
Рис. 3.14. Анализ ошибок системы в дискретном времени
Рис. 3.15. Структура системы без смещения
Рис. 4.1. Функциональная схема следящего измерителя
а
б
Рис.4.2. Программная реализация следящего измерителя
а б
Рис. 4.3. Интегратор на операционном усилителе
 Рис. 4.4. Дискретный интегратор
Рис. 4.4. Дискретный интегратор
Рис. 4.5. Следящий дальномер
![]()
![]()
![]()
![]()
![]()
|
|
|
|
|
|
|
|
|
|
Рис. 4.6. Временной дискриминатор
а б
Рис. 4.7. Управляемый генератор задержки
Рис.4.8. Фиксатор временного положения сигнала
Рис. 4.9. Временной дискриминатор кодированного сигнала
Рис. 4.10. Цифровой следящий дальномер
Рис. 4.11. Структурная схема сглаживающей цепи с двумя интеграторами
Рис. 12. Измерение угловой координаты
Рис. 4.12. Следящий угломер
Рис. 4.13 Метод конического сканирования диаграммы
Рис. 4.14. Формирование сигнала ошибки в угломере со сканированием диаграммы

Рис. 4.15. Формирование суммарного и разностных сигналов в моноимпульсных угломерах
Рис. 4.16. Формирование сигнала ошибки в моноимпульсном угломере
Рис. 4.17. ЛХ разомкнутого контура угломера
Рис. 4.18. Автоматическая подстройка частоты
Рис. 4.19. Векторное представление радиосигнала и квадратурный детектор
Рис. 4.20. Цифровой частотный детектор
![]()
![]()

![]()
![]()
![]()
Рис. 4.21. Цифровой управляемый генератор
Рис. 4.22. Цифровая АПЧ
Рис. 4.23. Аналоговая система ФАПЧ
Рис. 4.24. Фазовый детектор
Рис. 4.25. Фазовые детекторы для прямоугольных напряжений
Рис. 4.26. Синтезатор частоты
Рис. 4.27. Канал глиссады системы инструментальной посадки
Рис. 4.28. Функциональная схема системы АРУ
Рис. 4.29. Структурная схема системы АРУ
Рис. 4.30. Расчет спектральной плотности помех
Рис. 4.31. Флюктуационная характеристика
Рис. 4.32. Корреляционная функция шума
|
|
|
|
|
|


Рис. 5.1. Оптимизация параметров системы
Рис. 5.2. Оптимизация системы с одним дискретным интегратором
Рис. 5.3. Зависимость коэффициента усиления ![]() от параметра
от параметра ![]()
–Рис.2.2 из пособия
Рис. 5.4. Зависимость коэффициентов ![]() и
и ![]() от
параметра
от
параметра ![]()
–Рис.2.3 из пособия
Рис. 5.5. Схема задачи оптимальной фильтрации
Рис. 5.6. Эквивалентная схема оптимального фильтра
Рис. 5.7. Моделирование векторов состояния ![]() и
наблюдения
и
наблюдения ![]()
Рис. 5.8. Схема фильтра Калмана в непрерывном времени
Рис. 5.9. Модель случайных процессов (а) и фильтр Калмана (б) для дискретного времени
Рис. 5.10. Пример проектирования дискретного фильтра Калмана
Рис. 5.11. Формирование сигнала ошибки в нелинейном фильтре
Рис. 5.12. Структурная схема оптимального нелинейного фильтра
Рис. 5.13. Дальномерная система местоопределения
Рис. 6.1. Варианты интеграции комплексной системы: а – слабая; б – глубокая.
Рис. 6.2. Схема компенсации
Рис. 6.3. Фильтрация шума автономного (а) и радиотехнического измерителей (б)
Рис. 6.4. Комплексирование кодового и фазового каналов
Рис. 6.5. Комплексирование дальномера и датчика воздушной скорости
Рис. 6.6. Измерение скорости и положения самолета с использованием информации о движении (а) и комплексирование на основе принципа инвариантности (б)
Рис. 6.7. Дальномерная система измерения координат самолета (а) и последовательное измерение дальностей (б)
|
6.8. Комплексный фильтр дальномерной системы
Рис. 6.9. Комплексирование радиотехнической системы ближней навигации
Рис. 6.10. Структурная схема алгоритма фильтрации
Рис. 6.11. Геодезическая система координат
Рис. 6.12. Комплексирование спутниковой навигационной системы
Рис. 6.13. Глубокая интеграция спутниковой навигационной системы
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.