


















































Глава 2. ОПРЕДЕЛЕНИЕ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТОВ
С ПОМОЩЬЮ РНС
2.1. Основы построения комплексных навигационных систем
Одним из важных путей совершенствования навигационного оборудования является создание комплексных систем навигации, в которых обрабатывается информация от нескольких измерителей, определяющих одни и те же либо функционально связанные навигационные параметры. Так, например, доплеровские измерители скорости и инерциальные навигационные системы одновременно измеряют составляющие вектора полной путевой скорости объекта; радиосистемы ближней навигации или дальней навигации и системы счисления пути определяют координаты местоположения объекта и т.д.
Потребность в одновременном измерении одних и тех же параметров с помощью устройств и систем, работающих на различных физических принципах, обусловлена тем, что каждый измеритель в отдельности не удовлетворяет всем требованиям, которые предъявляются к измерению этих параметров. В частности, многие современные инерциальные навигационные системы не отвечают требованиям точности, радиосистемы ближней навигации – требованиям помехозащищенности, а доплеровские измерители скорости – требованию применимости в любых условиях полета и любых районах. Поэтому в современных навигационных системах осуществляется совместная обработка информации нескольких измерителей, т.е. комплексирование измерителей.
2.1.1. Причины снижения точности измерений в РНС
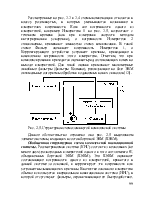
Устройства, входящие в РЛС и РНС, предназначены для определения характеризующего местоположение и движение объекта элемента W (дальность, угловые координаты, производные дальности и угловых координат по времени) по результатам измерения информативного параметра сигнала v (время запаздывания, амплитуда, доплеровский сдвиг частоты, фаза). Поэтому точность системы сильно зависит от степени совершенства измерителей информативного параметра сигнала, в качестве которых наиболее употребительны следящие измерители, реже – разомкнутые измерители [11].
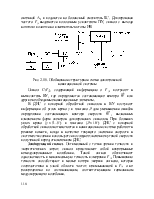
Качество следящего измерителя определяется полосой пропускания DFз.с и порядком m астатизма замкнутой следящей системы. Измерители, построенные по разомкнутой схеме, часто называют измерителями с непосредственным отсчетом, так как здесь параметр v преобразуется в напряжение, которое после фильтрации в инерционном звене с полосой пропускания DFи.з подается на измеритель напряжения. Качество измерителя с непосредственным отсчетом зависит от постоянства и линейности коэффициентов передачи его звеньев и от полосы пропускания DFи.з.
Общими причинами снижения точности следящего и неследящего измерителей информативного параметра сигнала являются флуктуационная и динамическая погрешности.
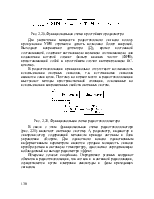
Флуктуационная погрешность вызывается шумами и помехами, действующими на входе измерителя. При данном уровне мешающих воздействий флуктуационная погрешность измерителя sфл тем меньше, чем уже его полоса пропускания DFи, равная DFз.с в измерителе следящего типа и DFи.з в измерителе с непосредственным отсчетом.
Динамическая погрешность является следствием изменений параметров движения объекта или цели (скорость, ускорение и т.п.). В следящем измерителе характер динамической погрешности sд (т.е. погрешности по скорости, по ускорению и т.п.) зависит от порядка астатизма m. При оптимальном экстраполяторе следящего измерителя, содержащем m = n+1 интеграторов, где n – порядок дифференциального уравнения, описывающего изменение параметра v при движении объекта (цели), динамическая погрешность отсутствует. В этом случае экстраполятор полностью учитывает динамику движения, объекта или цели и точно прогнозирует (экстраполирует) значение параметра v сигнала при следующем измерении. Однако обычно из-за технических трудностей не удается оптимизировать экстраполятор и возникает динамическая погрешность, которая
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.