














Министерство Высшего и Профессионального Образования
Санкт-Петербургский Государственный Электротехнический Университет
«ЛЭТИ» им. В. И. Ульянова (Ленина)
Кафедра РС
Курсовая работа по дисциплине
«Цифровые и микропроцессорные устройства»
Контроллер имитатора поверхностного сигнала
«Имитатор типа 2D-patt»
|
Выполнил: Группа: Проверил: |
Санкт-Петербург,
2011
Оглавление
|
Техническое задание |
||
|
Введение |
4 |
|
|
Раздел I Уточнение технического задания |
6 |
|
|
Раздел II |
8 |
|
|
Структурная схема контроллера |
8 |
|
|
Разработка аппаратной части контроллера |
9 |
|
|
Электрический расчет элементов схемы динамической индикации |
9 |
|
|
Селектор адреса |
||
|
Блок формирования временного паттерна |
||
|
Раздел III Программа |
12 |
|
|
Заключение |
17 |
|
|
Список литературы |
18 |
|
|
Приложение 1: перечень элементов |
19 |
|
|
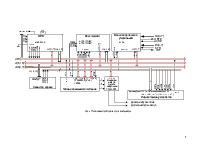
Приложение 2: схема электрическая принципиальная |
20 |
Введение
Импульсно-фазовая система дальней навигации первоначально разрабатывалась в США для целей проводки морских конвоев в годы второй мировой войны. Первая модель системы “Loran-А”, которая излучала импульсный сигнал в СВ-диапазоне, использовалась до 60-х годов, затем ее сменила система “Loran-C”, которая работает с фазоманипулированным сигналом в ДВ-диапазоне. Система “Loran” , разработана в США, в СССР была создана и эксплуатируется в настоящее время аналогичная система “Тропик”.
Радионавигационная система (РНС) “Loran-C” используется и на суше и на море. Но наилучшие результаты по точности и по дальности действия имеет на море, поэтому наибольшее распространение она получила в судоходстве, хотя известны примеры использования системы в авиации, автомобильном транспорте, в геофизике, метеорологии и др. Массовые разработки в области РНС типа “Loran-C” приходятся на 60-е годы. В настоящее время происходит эксплуатация весьма обширного парка существующей бортовой аппаратуры.
Предполагается, что систему “Loran-C”, в дальнейшем заменят системы спутниковой навигации. Подобные системы, развернутые в настоящее время США (GPS NAVSTAR) и Россией (GLONASS), вобрали в себя наиболее продвинутые достижения современной технологии.
Принцип действия РНС основан на измерение в точке приема промежутков времени между моментами прихода импульсных сигналов посылаемых тремя береговыми станциями, одна из которых является ведущей (ВЩ), другие станции X,Y,Z,W-ведомыми (ВМ). Ведущая станция обеспечивает синхронизацию цепочки на фиксированной частоте повторения, например SL3. Ведомые станции излучают сигналы на той же частоте повторения, но с фиксированной задержкой относительно сигнала ведущей станции. Разность расстояний от местоположения судна до радиостанций X,Y,Z,W легко найти, если измерить промежутки времени между моментами прихода импульсных сигналов. Наличие двух пересекающихся гипербол позволяет получить точку или однозначно определить местонахождение судна на поверхности.
Радионавигационный сигнал в точку приема может прийти не одним, а нескольками путями, отражаясь от ионизированных слоев атмосферы. Наиболее стабильные сигналы приходят в точку приема, огибая земную поверхность, но с увеличением расстояния они имеют наибольшее затухание. Сигналы отраженные от ионосферы имеют большую интенсивность на значительных дальностях от станции , но обладают ярко выраженной зависимостью от параметров солнечной радиации.
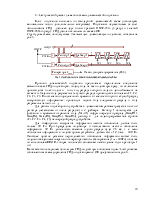
В РНС “Loran-C” сигнал излучается в виде пачки из 8 радиоимпульсов. Для различения сигналы ведущей и ведомой станций кодируются с использованием бинарного кода Франка, обладающего хорошей различимостью (хорошей взаимно корреляционной функцией). Кодирование сигналов - фазовое, означающее при бинарном коде, что начальная фаза сигнала в зависимости от компонентов кода может принимать значение 0 или π. Такое кодирование связано с использованием на станции генераторов ударного возбуждения для формирования радиоимпульсов. При этом код “0”-может формироваться импульсом положительной полярности, а код π - импульсом отрицательной полярности.
Фазовое кодирование эффективно только при использовании синхронных методов генерирования и приема сигналов. Синхронизм на станциях обеспечивается использованием высокостабильных атомных стандартов частоты с дополнительной подстройкой эталонов ведомых станций под эталон ведущей. Синхронизм премных устройств реализуется системами фазовой автоподстройки по принимаемому сигналу.
В настоящее время в разных районах Мирового океана эксплуатируется значительное число станций РНС “Loran-C”. Все они работают на частоте 100 кГц и используют одно и то же кодирование. Для уменьшения взаимного влияния соседних цепочек сигналы излучаются на различных частотах повторения. Периоды повторения сигналов делятся на группы периодов основных (SS,SL, SH), резервных (S, L, H) и дополнительных.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.