





САНКТ-ПЕТЕРБУРГСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ АЭРОКОСМИЧЕСКОГО ПРИБОРОСТРОЕНИЯ
ИССЛЕДОВАНИЕ САМОЛЕТНОЙ СЛЕДЯЩЕЙ СИСТЕМЫ АВТОМАТИЧЕСКОГО СОПРОВОЖДЕНИЯ ЦЕЛИ ПО НАПРАВЛЕНИЮ
методические указания к выполнению лабораторной работы
по курсу "Радиоавтоматика"
Санкт-Петербург
2000
ИССЛЕДОВАНИЕ САМОЛЕТНОЙ СЛЕДЯЩЕЙ СИСТЕМЫ АВТОМАТИЧЕСКОГО СОПРОВОЖДЕНИЯ ЦЕЛИ ПО НАПРАВЛЕНИЮ
Цель работы: изучение принципа действия и устройства системы автоматического сопровождения по направлению (АСН) и исследование переходного и установившегося режимов работы этой системы.
1. Методические указания.
Следящая система автоматического сопровождения цели по направлению предназначена для автоматического (т.е. без участия человека-оператора) слежения за целью. В режиме слежения антенна направлена на цель, поэтому следящая система является также измерителем угловых координат подвижных целей.
1.1. Структурная схема.
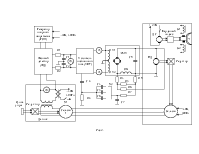
В лабораторной работе исследуется система с коническим сканированием диаграммы направленности антенны. Ее структурная схема изображена на рис.1 а .
Приемно-передающая антенна имеет иглообразную форму диаграммы направленности. Ширина диаграммы направленности по уровню половинной мощности составляет несколько градусов. Диаграмма направленности антенны вращается относительно некоторой оси. Вращение (сканирование) диаграммы направленности происходит с постоянной круговой частотой Wск.
Вращение антенны осуществляется двигателем сканирования (ДС), скорость вращения которого стабилизируется специальной системой.
В рассматриваемой схеме сканирование происходит за счет вращения рефлектора (отражателя) антенны. Ось вращения рефлектора смещена относительно максимума диаграммы направленности (относительно оси симметрии рефлектора.) на некоторый угол.
На рис.1.а условно изображены два крайних (верхнее и нижнее) положения, которые занимает диаграмма направленности при сканировании. Для упрощения будем считать, что цель Ц расположена в плоскости чертежа, как показано на pиc.l.a. Тогда в точке приема О плотность потока мощности электромагнитной волны, отраженной от цели, будет максимальна, в те моменты времени, когда диаграмма направленности занимает верхнее положение, и минимальное, когда диаграмма. направленности занимает нижнее положение. При всех промежуточных положениях диаграммы направленности антенны она принимает промежуточное значение. Отношение максимального значения плотности потока мощности электромагнитной волны к минимальному пропорционально отношению длин отрезков ОА1 и ОБ1.
Для импульсной радиолокационной станции на входе приемного устройства (ПУ) эпюра напряжения Uпy имеет вид, изображенный на рис.1.6. Это напряжение представляет собой короткие радиоимпульсы, модулированные по амплитуде.
Таким образом, сканирование диаграммы направленности приводит к амплитудной модуляции радиоимпульсов. Огибающая отраженных от цели радиоимпульсов по форме близка к синусоиде, а частота огибающей равна частоте сканирования Wск.
Из рис.1.a следует, что при увеличении угла 5 между осью вращения диаграммы направленности и направлением на цель, увеличивается отношение длин отрезков ОА и ОБ, если d>0 и уменьшается, если d<0. Следовательно, глубина модуляции и фаза огибающей радиоимпульсов будут зависеть от угла d. При совпадении направления на цель с осью вращения диаграммы направленности амплитудная модуляция исчезает. Поэтому ось вращения диаграммы направленности называют равносигнальным направлением (РН).
Принятые антенной радиоимпульсы поступают в приемное
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.