

Дано:
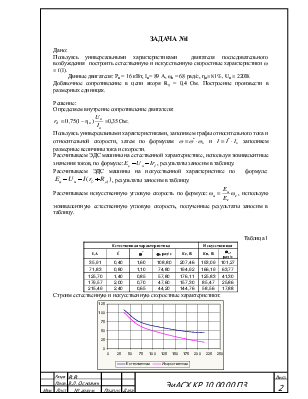
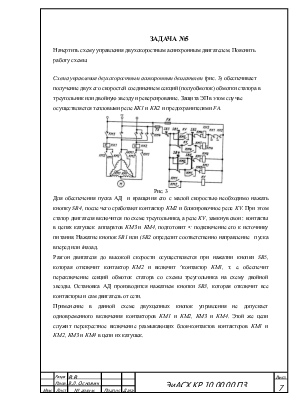
Пользуясь универсальными характеристиками двигателя последовательного возбуждения построить естественную и искусственную скоростные характеристики ω = f(I).
Данные двигателя: Рн = 16 кВт, Iн= 89 А, ωн = 68 рад/с, ηн= 81%, Uн = 220В.
Добавочное сопротивление в цепи якоря Rд = 0,4 Ом. Построение произвести в размерных единицах.
Решение:
Определяем внутренне сопротивление двигателя:
 =0,35 Ом;
=0,35 Ом;
Пользуясь универсальными характеристиками, заполняем
графы относительного тока и относительной скорости, затем по формулам ![]() и
и ![]() заполняем
размерные величины тока и скорости.
заполняем
размерные величины тока и скорости.
Рассчитываем ЭДС машины на естественной характеристике,
используя эквивалентные значения токов, по формуле:![]() , результаты
заносим в таблицу.
, результаты
заносим в таблицу.
Рассчитываем ЭДС машины на искусственной
характеристике по формуле: ![]() , результаты заносим в
таблицу.
, результаты заносим в
таблицу.
Рассчитываем искусственную
угловую скорость по формуле: , использую
эквивалентную естественную угловую скорость, полученные результаты заносим в
таблицу.
, использую
эквивалентную естественную угловую скорость, полученные результаты заносим в
таблицу.
Таблица 1
|
Естественная характеристика |
Искусственная |
|||||
|
I,А |
I* |
w* |
w, рад/с |
Ее, В |
Еu, В |
wu, рад/с |
|
35,91 |
0,40 |
1,60 |
108,80 |
207,46 |
193,09 |
101,27 |
|
71,83 |
0,80 |
1,10 |
74,80 |
194,92 |
166,19 |
63,77 |
|
125,70 |
1,40 |
0,85 |
57,80 |
176,11 |
125,83 |
41,30 |
|
179,57 |
2,00 |
0,70 |
47,60 |
157,30 |
85,47 |
25,86 |
|
215,49 |
2,40 |
0,65 |
44,20 |
144,76 |
58,56 |
17,88 |
Строим естественную и искусственную скоростные характеристики:
Задача
№2
Дано:
Для асинхронного двигателя с фазным ротором, имеющего данные: Рн = 30 кВт, Е2н = 235 В, I2н = 73 А, ωн = 98 рад/с, рассчитать аналитически сопротивления отдельных секций пускового реостата и полное сопротивление роторной цепи на отдельных ступенях пуска. Пуск форсированный при М1* = 1,9.
Решение:
Количество ступеней пускового реостата не задано, но исходя из мощности заданного двигателя, предполагаем, что m=4.
Определяем отношение пускового момента к переключающему:
 =2,02
=2,02
где  = 0,06 - номинальное
скольжение
= 0,06 - номинальное
скольжение
 104,72
104,72![]() , где f- частота питающей
сети, Гц;
, где f- частота питающей
сети, Гц;
р - число пар полюсов, принятое из условия наименьшего скольжения;
Проверяем пусковой момент:
![]()
![]()
![]() Коэффициент удовлетворяет условиям.
Коэффициент удовлетворяет условиям.
Определяем номинальное сопротивление асинхронного двигателя с фазным ротором:
 1,86 Ом;
1,86 Ом;
Определяем внутренне сопротивление роторной обмотки:
![]() 0,12 Ом;
0,12 Ом;
Определяем значения отдельных секций пускового реостата:
![]() 0,082 Ом;
0,082 Ом;
![]() 0,14 Ом;
0,14 Ом;
![]() 0,24 Ом;
0,24 Ом;
![]() 0,4 Ом;
0,4 Ом;
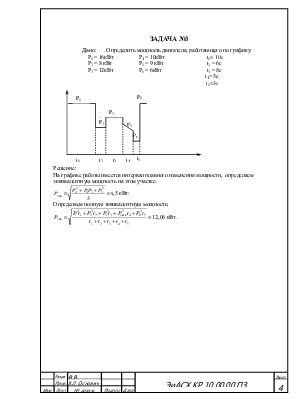
Дано: . Определить мощность двигателя, работающего по графику:
Р1 = 16кВт Р4 = 10кВт t1= 10c
Р2 = 8 кВт Р5 = 9 кВт t2 = 6с
Р3 = 12кВт Р6 = 6кВт t3 = 8с
![]()
![]()
![]()
![]() t4= 5с
t4= 5с
![]() t5=3c
t5=3c
Решение:
На графике работы имеется интервал плавного изменения мощности, определяем эквивалентную мощность на этом участке:
 9,5 кВт;
9,5 кВт;
Определяем полную эквивалентную мощность:
 12,06 кВт.
12,06 кВт.
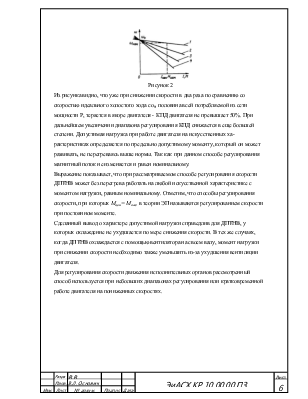
Регулирование частоты вращения ДПТ изменение подводимого к якорю напряжения.
Этот способ применяется при невысоких требованиях к показателям качества регулирования скорости, отличаясь в то же время универсальностью и простотой реализации.
Скорость ω0 не зависит от Ra, а наклон характеристик, как это следует из (4.8), тем больше, чем больше /?д. Этот краткий анализ позволяет изобразить семейство механических (электромеханических) характеристик ДПТНВ в виде совокупности линий различного наклона (жесткости), проходящих через одну и ту же точку на оси скорости с ординатой ω0. Характеристика 1 соответствует случаю, когда Ra - 0 и является естественной, искусственные характеристики 2... 4 построены при наличии в цепи якоря резисторов с сопротивлениями соответственно Rд1 < Ra2 < Rд3.
Оценим данный способ регулирования скорости по основным показателям. Диапазон регулирования скорости небольшой (обычно 2...3). Причина этого заключается в снижении жесткости характеристик по мере увеличения Rд. Направление регулирования скорости - вниз от естественной характеристики. Плавность регулирования скорости определяется характером изменения R . Если это сопротивление изменяется плавно, то данный способ обеспечивает плавное регулирование скорости. Чаще же рассматриваемый способ обеспечивает ступенчатое регулирование скорости. Стабильность скорости снижается по мере увеличения диапазона регулирования, так как уменьшается жесткость
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.