































Федеральное государственное автономное образовательное учреждение
высшего профессионального образования
«СИБИРСКИЙ ФЕДЕРАЛЬНЫЙ УНИВЕРСИТЕТ»
Институт цветных металлов и материаловедения
Кафедра автоматизации производственных процессов в металлургии
КУРСОВАЯ РАБОТА
Расчет системы автоматического регулирования скорости вращения вала двигателя постоянного тока с независимым возбуждением
Пояснительная записка
Руководитель доц., к.т.н., В.А. Осипова
Студент МФ 07-08 А.А. Аврамчук
Красноярск 2010
Федеральное государственное автономное образовательное учреждение
высшего профессионального образования
«СИБИРСКИЙ ФЕДЕРАЛЬНЫЙ УНИВЕРСИТЕТ»
Институт цветных металлов и материаловедения
Кафедра автоматизации производственных процессов в металлургии
ЗАДАНИЕ
на курсовую работу
1 Тема курсовой работы: Расчет системы автоматического регулирования скорости вращения вала двигателя постоянного тока с независимым возбуждением.
2 Дата выдачи задания 09.09.2010
3 Срок сдачи студентом законченной работы 08.12.2010
4 Исходные данные к КР: n=1500 об/мин; Рном=0,30 кВт; tp=1,5 с; ∆=10%; 𝜎 = 25%.
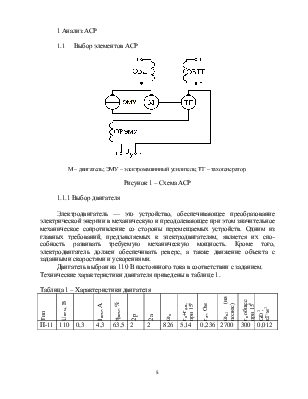
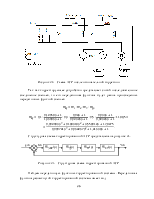
5 Перечень графического материала: схема АСР (рисунок 1).
Руководитель курсовой работы доц., к.т.н., В.А. Осипова
Студент МФ 07-08 А.А. Аврамчук
СОДЕРЖАНИЕ
Введение
1 Анализ АСР
1.1 Выбор
элементов АСР
1.1.1 Выбор двигателя
1.1.2
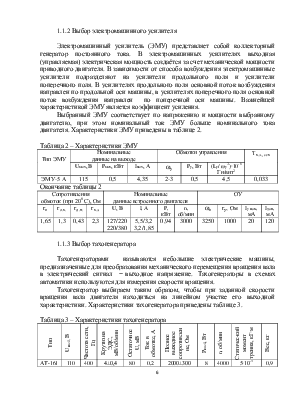
Выбор электромашинного усилителя (ЭМУ)
1.1.3
Выбор тахогенератора
1.2 Определение передаточных функций основных элементов АСР
1.2.1
Определение передаточной функции двигателя
1.2.2 Определение передаточной функции ЭМУ
1.2.3
Определение передаточной функции тахогенератора
1.3 Определение передаточной функции АСР
1.4
Исследование устойчивости АСР
1.4.1 Расчет критического коэффициента усиления
1.4.2
Расчет необходимого коэффициента усиления
1.5 Построение ВЧХ замкнутой системы
1.5.1 Разбивка
ВЧХ на трапеции
1.6 Построение переходного процесса системы
1.6.1 Построение переходного процесса методом трапеций
1.6.2 Построение переходного процесса в VisSim
1.6.3 Построение переходного процесса в MathCad
1.7 Анализ результатов первой части курсовой работы
2 Синтез
АСР
2.1 Построение ЛАЧХ исходной системы
2.1.1 Построение ЛАЧХ двигателя
2.1.2 Построение ЛАЧХ ЭМУ
2.1.3 Построение ЛАЧХ тахогенератора
2.1.4 Построение ЛАЧХ некорректированной системы
2.2 Построение ЛАЧХ желаемой системы
2.3 Построение ЛАЧХ корректирующего устройства
2.4 Выбор и расчет корректирующего устройства
2.5 Определение передаточной функции корректирующего
устройства
и корректированной АСР
2.6 Исследование устойчивости корректированной АСР
2.7 Построение переходного процесса корректированной АСР
2.7.1 Построение переходного процесса в VisSim
2.7.2 Построение переходного процесса в MathCad
2.8 Анализ результатов курсовой работы
Заключение
Список
использованных источников
ВВЕДЕНИЕ
При решении практических задача автоматического регулирования исходят обычно из заданных элементов системы и объекта регулирования, добиваясь с помощью соответствующих мер улучшения точности и быстродействия системы регулирования в соответствии с поставленными требованиями. Задача получения требуемого качества тесно связана с задачей синтеза. Синтез систем автоматического регулирования в общем виде решает задачу приближения искомых характеристик к условно оптимальным, определенным по техническим требованиям. В системах регулирования искомыми параметрами являются коэффициенты усиления и параметры, определяющие характер передаточной функции. При определении характера передаточной функции приходится в первую очередь определять параметры необходимых корректирующих устройств, включаемых в систему для улучшения показателей качества процессов регулирования и динамической точности.
В последнее время широкое распространение получил синтез методом логарифмических частотных характеристик. Это подтверждается большим количеством разработанных номограмм, диаграмм, графиков и типовых характеристик.
Достоинством метода является простота построения некорректированной и желаемой характеристик, а также нахождение суммарной характеристики последовательных корректирующих звеньев.
Расчет автоматической системы, состоящей из связанных между собой в единую замкнутую цепь различных элементов, представляет достаточно сложную задачу с возможностью многозначного решения.
Целью курсовой работы является овладение методикой выбора элементов АСР и расчета их передаточных функций.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.