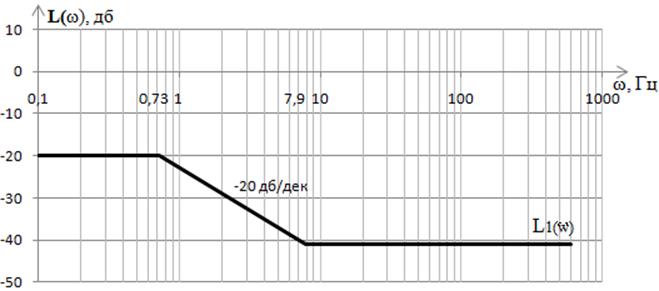
Рисунок 15 – ЛАЧХ корректирующего звена
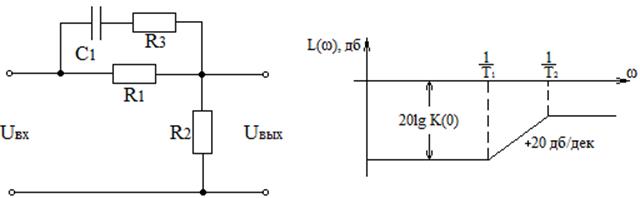
Участок ЛАЧХ КУ на диапазоне частот от 25 до 43 Гц реализуем RC цепью представленной на рисунке 16 (а), его ЛАЧХ приведена на рисунке 16 (б).
а) б)
Рисунок 16 – Схема корректирующего звена и его ЛАЧХ
Передаточная функция корректирующего звена

где ![]() (42)
(42)
![]() (43)
(43)
![]() (44)
(44)
Найдем постоянные времени
Расчет параметров корректирующего звена
K(0) = 0.3,
тогда
![]()
Зададим значение параметра R1 = 10 кОм. Из выражения (44) находим R2
![]()
![]()
Из выражения (43) находим значение параметра С1
![]()
Из выражения (42) находим R3
![]()
Передаточная функция корректирующего звена
Строим ЛАЧХ корректирующего звена (рисунок 17).
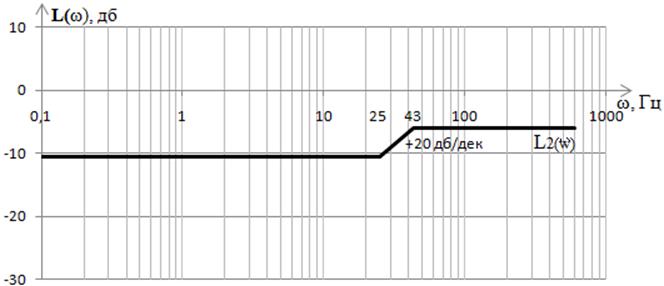
Рисунок 17 – ЛАЧХ корректирующего звена
Корректирующее звено, представленное на рисунке 16, рассчитываем еще раз, для диапазона 30 ̶ 43 Гц.
Найдем постоянные времени
Расчет параметров корректирующего звена
K(0) = 0.5,
тогда
![]()
Зададим значение параметра R1 = 10 кОм. Из выражения (44) находим R2
![]()
![]()
Из выражения (43) находим значение параметра С1
![]()
Из выражения (42) находим R3
![]()
Передаточная функция корректирующего звена
Строим ЛАЧХ корректирующего звена (рисунок 18).
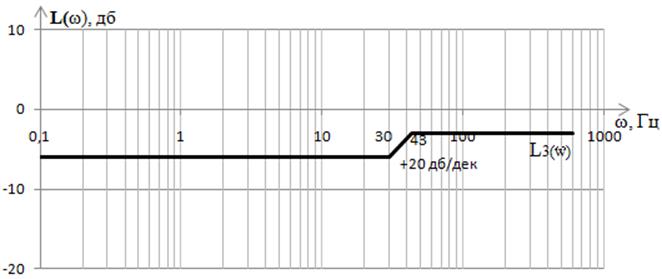
Рисунок 18 – ЛАЧХ корректирующего звена
Схема соединенных корректирующих звеньев через разделительные усилители представлена на рисунке 19.
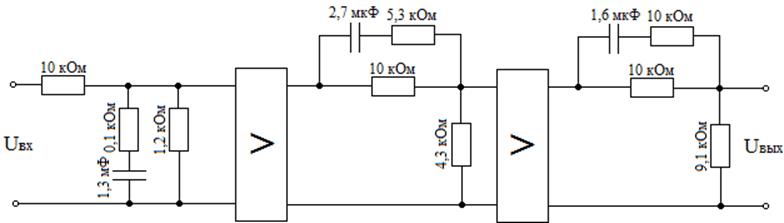
Рисунок 19 – Схема корректирующего устройства
Построим ЛАЧХ корректирующего устройства (рисунок 20) путем графического сложения ЛАЧХ выбранных звеньев
![]()
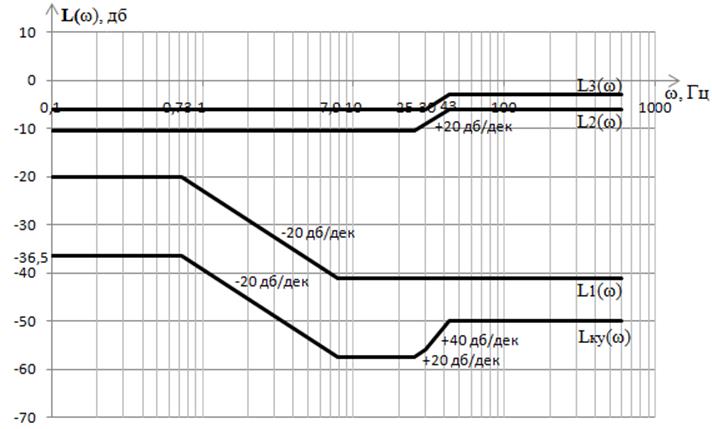
Рисунок 20 – ЛАЧХ корректирующего устройства
Построенная ЛАЧХ отстает от требуемой на 61,5 дБ, для получения необходимой ЛАЧХ добавим в схему усилитель.
Передаточная функция усилителя
![]()
Начальное значение ЛАЧХ усилителя
![]()
Строим ЛАЧХ усилителя (рисунок 21).
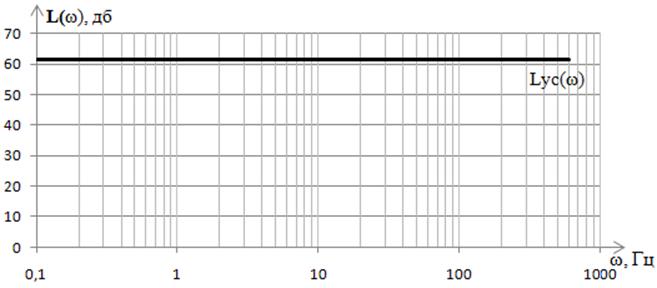
Рисунок 21 – ЛАЧХ усилителя
Построим ЛАЧХ корректирующего устройства с учетом усиления
(рисунок 22).
![]()
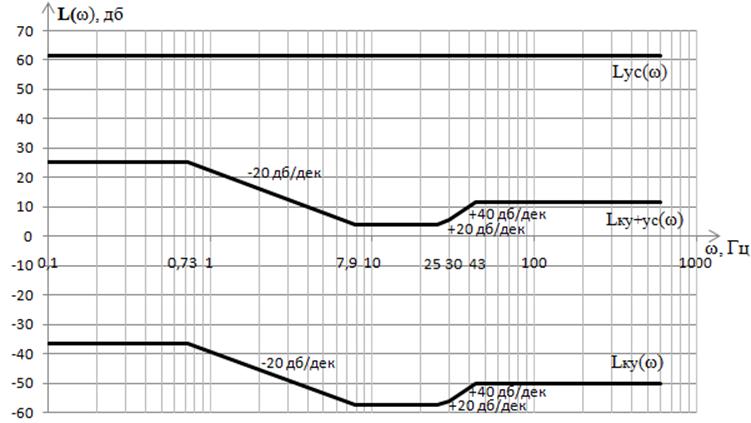
Рисунок 22 – ЛАЧХ корректирующего устройства с учетом усиления
2.5 Определение передаточной функции корректирующего устройства и АСР после коррекции
Схема АСР после окончательной коррекции представлена на рисунке 23.
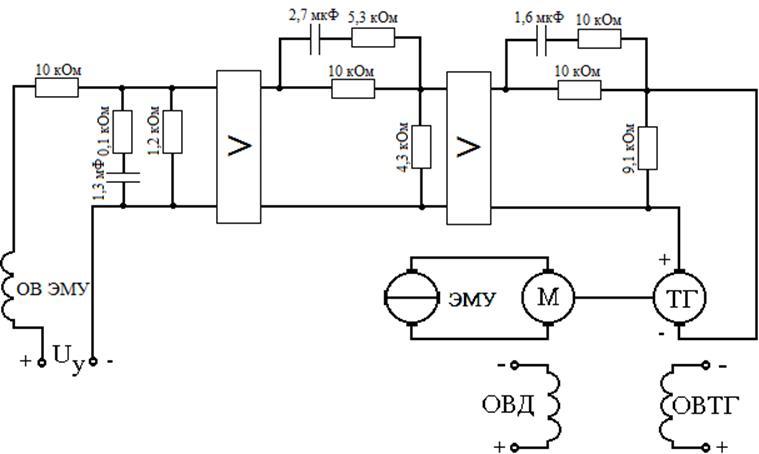
Рисунок 23 − Схема АСР после окончательной коррекции
Так как корректирующее устройство представляет собой последовательное соединение звеньев, то его передаточная функция будет равна произведению передаточных функций звеньев
![]()


Структурная схема корректированной АСР представлена на рисунке 24.

Рисунок 24 – Структурная схема корректированной АСР
Найдем передаточную функцию корректированной системы. Передаточная функция разомкнутой корректированной системы имеет вид
![]()



Передаточная функция замкнутой корректированной системы


2.6 Исследование устойчивости корректированной АСР
Устойчивость системы будем определять по алгебраическому критерию Гурвица: для того чтобы система была устойчивой, необходимо и достаточно, чтобы главный определитель Гурвица и все диагональные миноры были положительны.
Характеристическое уравнение системы имеет вид
![]() .
.
Правило Стодолы выполняется: все коэффициенты характеристического уравнения положительные, то есть одного знака.
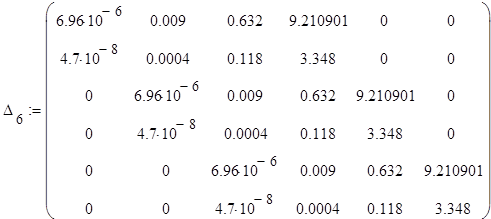
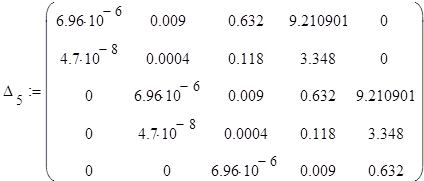
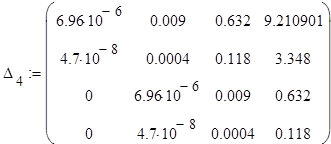
Рассчитаем главный определитель Гурвица и диагональные миноры в MathCad.
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
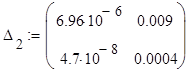
![]() ;
;
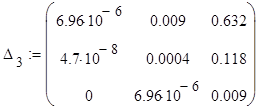
![]()
![]() .
.
Исследуемая система устойчива, так как главный определитель Гурвица и все диагональные миноры положительны.
2.7 Построение переходного процесса корректированной АСР
2.7.1 Построение переходного процесса в VisSim
Переходной процесс корректированной системы построенный в VisSim представлен на рисунке 25.
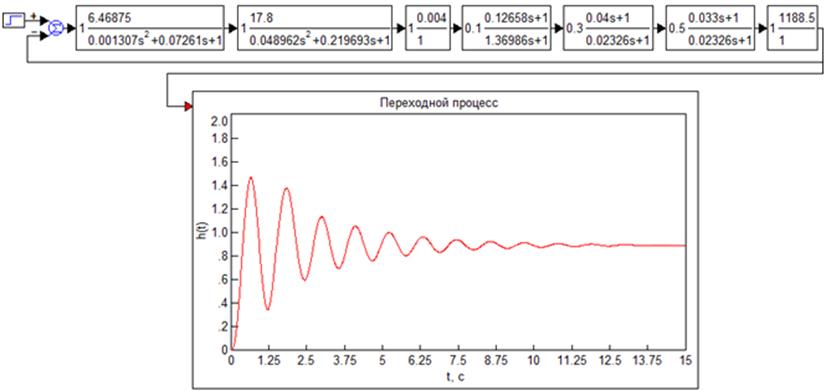
Рисунок 25 ̶ Переходной процесс корректированной системы
построенный в VisSim
2.7.2 Построение переходного процесса в MathCad
Переходной процесс корректированной системы построенный в MathCad представлен на рисунке 26.
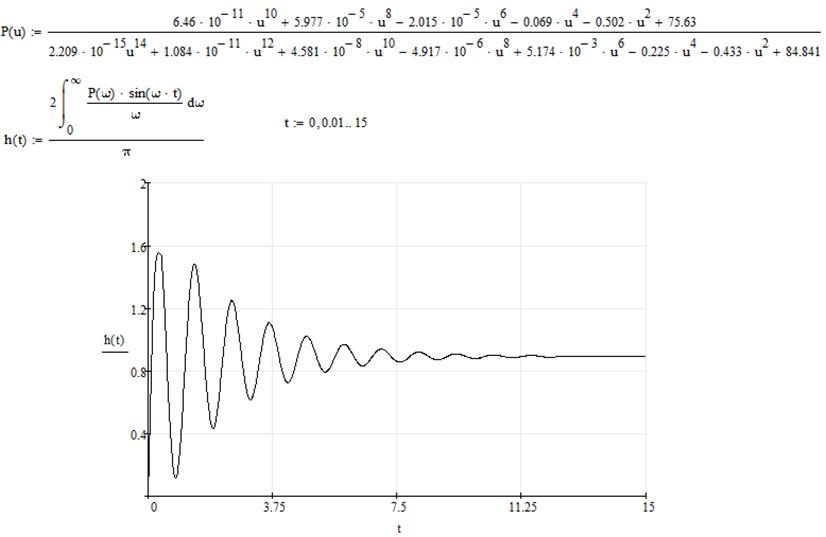
Рисунок 26 ̶ Переходной процесс корректированной системы
построенный в MathCad
2.8 Анализ результатов курсовой работы
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.