1.6.2 Построение переходного процесса в VisSim
Переходной процесс системы построенный в VisSim представлен на рисунке 6.
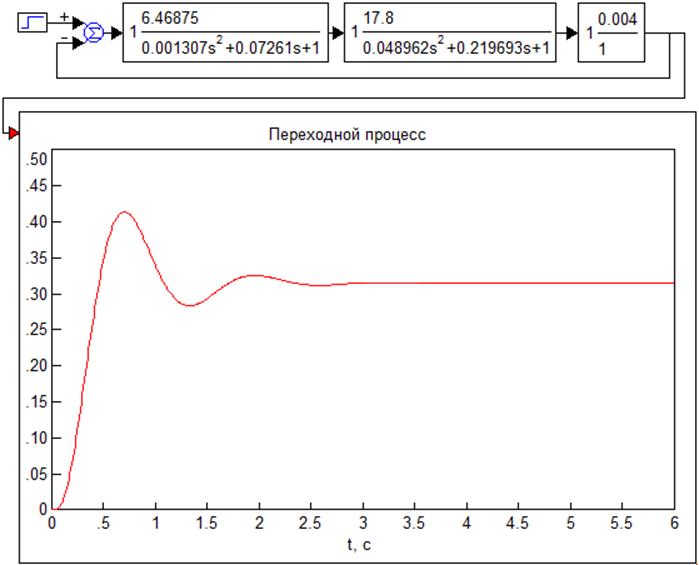
Рисунок 6 – Переходной процесс системы построенный в VisSim
1.6.3 Построение переходного процесса в MathCad
Переходной процесс системы построенный в MathCad представлен на рисунке 7.
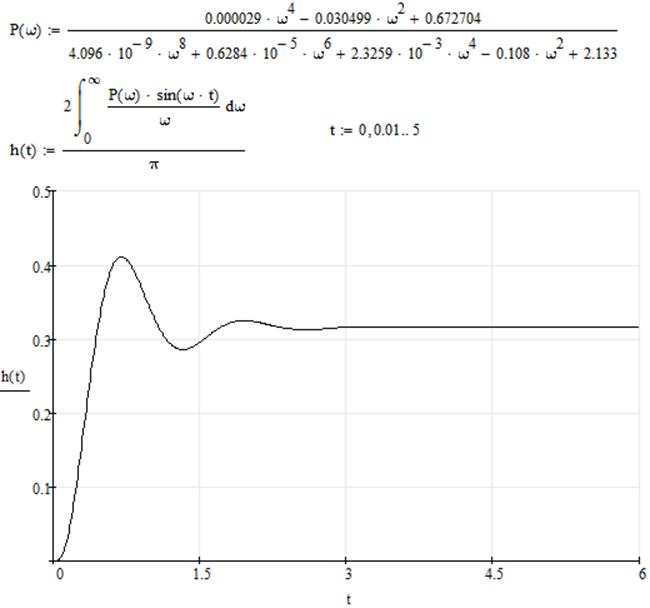
Рисунок 7 – Переходной процесс системы построенный в MathCad
1.7 Анализ результатов первой части курсовой работы
Находим показатели качества по переходным процессам построенным методом трапеций, в MathCad и в VisSim используя следующие формулы
̶ перерегулирование

̶ степень затухания

̶ логарифмический декремент затухания

Таблица 8 – Анализ результатов первой части курсовой работы
|
Показатель |
h(t) ∑Тр |
h(t) VisSim |
h(t) MathCad |
|
Вид h(t) |
Колебательный |
Колебательный |
Колебательный |
|
h(∞) |
0.321 |
0.315 |
0.318 |
|
hmax(t) |
0,410 |
0,413 |
0,413 |
|
tн, с |
0,435 |
0,458 |
0,459 |
|
tm, с |
0,712 |
0,704 |
0,702 |
|
tp, с |
2,90 |
2,857 |
2,850 |
|
𝜎, % |
27,73 |
31,11 |
29,87 |
|
η, % |
89,80 |
89,80 |
89,80 |
|
q |
1,848 |
2.282 |
2.282 |
Величины показателей качества являются удовлетворительными.
Показатели качества, найденные по переходному процессу построенному приближенным методом трапеций не существенно отличаются от показателей качества, определенных по переходным процессам построенными в VisSim и в MathCad, что говорит о правильности расчетов и правильном использовании метода трапеций.
2 Синтез АСР
Задачей синтеза является определение вида и структуры корректирующего
устройства, а так же расчет его параметров. Для решения нашей задачи используем синтез методом ЛАЧХ. Данный метод основан на соответствии между логарифмическими частотными характеристиками разомкнутой системы и ее статическими и динамическими свойствами в замкнутом состоянии.
2.1 Построение ЛАЧХ исходной системы
2.1.1 Построение ЛАЧХ двигателя
Передаточная функция двигателя имеет вид

Двигатель является колебательным звеном, поэтому необходимо определить коэффициент затухания
Так как коэффициент затухания лежит вне диапазона 0,35 - 0,7, представляем двигатель как инерционное звено второго порядка, для этого необходимо разложить на множители знаменатель передаточной функции. Воспользуемся теоремой Виета.
Решаем квадратное уравнение
![]()
![]()
![]()


Раскладываем квадратное уравнение на множители
![]()
![]()
![]()
Передаточная функция двигателя принимает вид

Находим значения частоты среза
Находим начальное значение ЛАЧХ
![]() дб.
дб.
Строим ЛАЧХ двигателя (рисунок 8).
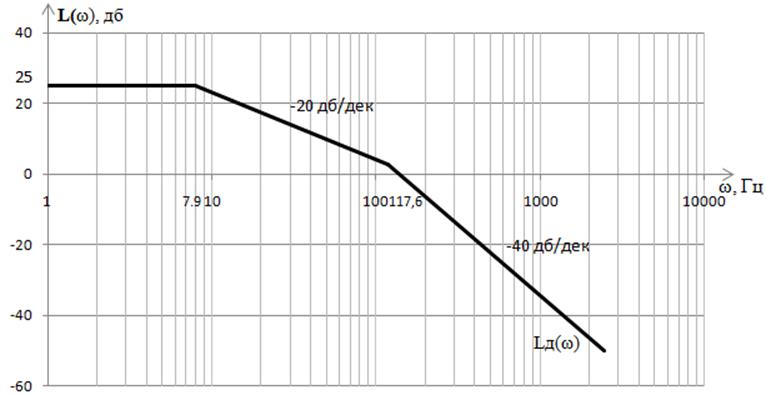
Рисунок 8 – ЛАЧХ двигателя
2.1.2 Построение ЛАЧХ ЭМУ
Передаточная функция ЭМУ имеет вид

Находим значения частоты среза
Находим начальное значение ЛАЧХ
![]() дб.
дб.
Строим ЛАЧХ ЭМУ (рисунок 9).
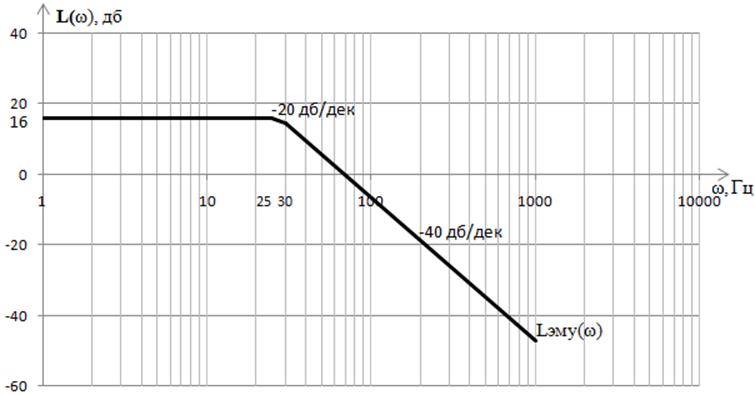
Рисунок 9 – ЛАЧХ ЭМУ
2.1.3 Построении ЛАЧХ тахогенератора
Передаточная функция тахогенератора
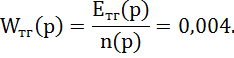
Находим начальное значение ЛАЧХ
![]() дб.
дб.
Строим ЛАЧХ тахогенератор (рисунок 10).
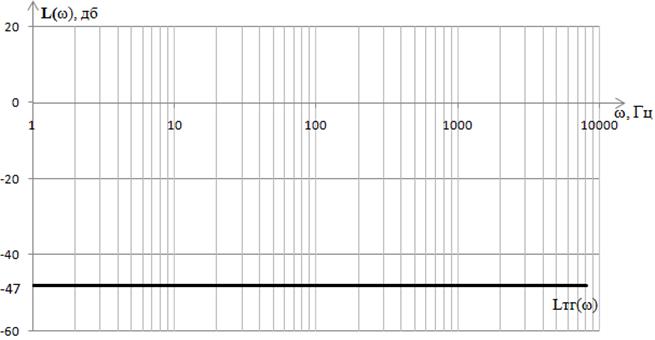
Рисунок 10 – ЛАЧХ тахогенератора
2.1.4 Построение ЛАЧХ некорректированной системы
Так как передаточная функция последовательного соединения элементов равна произведению передаточных функций этих элементов, ЛАЧХ системы равна сумме ЛАЧХ отдельных элементов.
Строим график ЛАЧХ некорректированной системы (рисунок 11).
Рисунок 11 – ЛАЧХ некорректированной системы
2.2 Построение ЛАЧХ желаемой системы
При построении желаемой ЛАЧХ необходимо помнить, что исследуемая система должна быть минимально-фазовой.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.