1 Анализ АСР
1.1 Выбор элементов АСР
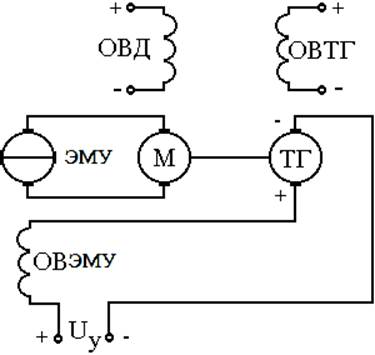
М – двигатель; ЭМУ – электромашинный усилитель; ТГ – тахогенератор.
Рисунок 1 – Схема АСР
1.1.1 Выбор двигателя
Электродвигатель — это устройство, обеспечивающее преобразование электрической энергии в механическую и преодолевающее при этом значительное механическое сопротивление со стороны перемещаемых устройств. Одним из главных требований, предъявляемых к электродвигателям, является их способность развивать требуемую механическую мощность. Кроме того, электродвигатель должен обеспечивать реверс, а также движение объекта с заданными скоростями и ускорениями.
Двигатель выбран на 110 В постоянного тока в соответствии с заданием.
Технические характеристики двигателя приведены в таблице 1.
Таблица 1 – Характеристики двигателя
|
Тип |
Uном, В |
Iном, А |
ηном, % |
2p |
2a |
ωя |
rя+rд.п., при 150 |
rст, Ом |
ωв1 (на полюс) |
rв общее при 150 |
GD2, кГ·м2 |
|
|
П-11 |
110 |
0,3 |
4,3 |
63,5 |
2 |
2 |
826 |
5,14 |
0,236 |
2700 |
300 |
0,012 |
1.1.2 Выбор электромашинного усилителя
Электромашинный усилитель (ЭМУ) представляет собой коллекторный генератор постоянного тока. В электромашинных усилителях выходная (управляемая) электрическая мощность создаётся за счет механической мощности приводного двигателя. В зависимости от способа возбуждения электромашинные усилители подразделяют на усилители продольного поля и усилители поперечного поля. В усилителях продольного поля основной поток возбуждения направлен по продольной оси машины, в усилителях поперечного поля основной поток возбуждения направлен по поперечной оси машины. Важнейшей характеристикой ЭМУ является коэффициент усиления.
Выбранный ЭМУ соответствует по напряжению и мощности выбранному двигателю, при этом номинальный ток ЭМУ больше номинального тока двигателя. Характеристики ЭМУ приведены в таблице 2.
Таблица 2 – Характеристики ЭМУ
|
Тип ЭМУ |
Номинальные данные на выходе |
Обмотки управления |
Tк.з., сек |
||||
|
Uвых, В |
Pвых, кВт |
Iвых, А |
ωy |
Py, Вт |
(Ly/ ωy2)·10-6 Гн/вит2 |
||
|
ЭМУ-5 А |
115 |
0,5 |
4,35 |
2-3 |
0,5 |
4,5 |
0,033 |
Окончание таблицы 2
|
Сопротивления обмоток (при 200 С), Ом |
Номинальные данные встроенного двигателя |
ОУ |
|||||||||
|
rя |
rо.к. |
rд.п. |
rк.з. |
U, В |
I, A |
P, кВт |
n, об/мин |
ωя |
rу, Ом |
Iу ном, мА |
Iдоп, мА |
|
1,65 |
1,3 |
0,43 |
2,3 |
127/220 220/380 |
5,5/3,2 3,2/1,85 |
0,94 |
3000 |
3250 |
1000 |
20 |
120 |
1.1.3 Выбор тахогенератора
Тахогенераторами называются небольшие электрические машины, предназначенные для преобразования механического перемещения вращения вала в электрический сигнал ̶ выходное напряжение. Тахогенераторы в схемах автоматики используются для измерения скорости вращения.
Тахогенератор выбираем таким образом, чтобы при заданной скорости вращения вала двигателя находиться на линейном участке его выходной характеристики. Характеристики тахогенератора приведены таблице 3.
Таблица 3 – Характеристики тахогенератора
|
Тип |
Uвозб, В |
Частота сети, Гц |
Крутизна ЭДС, мВ/об/мин |
Остаточное U, мВ |
Ток в обмотке, А |
Полное выходное сопротивление, Ом |
Рвозб, Вт |
n, об/мин |
Статичес-кий момент трения, кГ·м |
Вес, кг |
|
АТ-161 |
110 |
400 |
4±0,4 |
80 |
0,2 |
2000±300 |
8 |
4000 |
5·10-5 |
0,9 |
1.2 Определение передаточных функций основных элементов АСР
1.2.1 Определение передаточной функции двигателя
Передаточная функция двигателя в общем виде:

где n – скорость вращения вала двигателя;
Uя – напряжение на якоре двигателя;
Тя – постоянная времени цепи якоря;
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.