По результатам таблицы 3.5 на комплексной плоскости строим АФЧХ системы (рисунок 3.9).
![]()
Рисунок 3.9 – АФХ разомкнутой системы
Годограф Найквиста не пересекает точку на комплексной плоскости (–1; j0), поэтому система в замкнутом состоянии является устойчивой и обладает достаточным запасом устойчивости по амплитуде Δa = 0,42 и по фазе Δφ = 30º, что удовлетворяет требуемым показателям качества [11].
3.5 Проверка настроек регулятора на оптимальность
Для того чтобы убедиться в правильности нахождения настроек регулятора, изменим настройки ПИД-регулятора на 20 % в большую и меньшую сторону (таблица 3.6).
Таблица 3.6 – Настройки регулятора
|
Настройки ПИД-регулятора |
Оптимальные |
Увеличенные на 20 % |
Уменьшенные на 20 % |
|
Кр Ки Кд |
0,09560000 0,00080784 4,95000000 |
0,114720 0,000969 5,940000 |
0,076480 0,000645 3,960000 |
Переходные процессы, полученные в результате моделирования с начальными настройками регулятора, с оптимальными настройками регулятора, а также с настройками регулятора, увеличенными и уменьшенными на 20 %, представлены на рисунке 3.10.
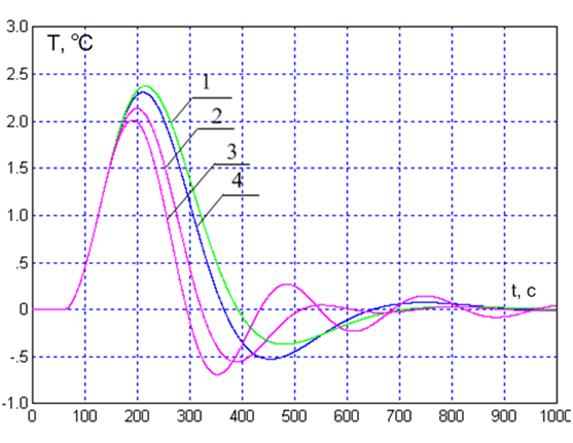
1 – с исходными настройками ПИД-регулятора; 2 – с
оптимальными настройками
ПИД-регулятора; 3 – с увеличенными на 20 % настройками ПИД-регулятора; 4 – с
уменьшенными на 20 % настройками ПИД-регулятора
Рисунок 3.10 – Переходные процессы в системе
Определим показатели качества полученных процессов, для удобства их восприятия полученные данные сведем в таблицу 3.7.
Таблица 3.7 – Сравнительный анализ показателей качества переходных процессов
|
Показатели качества |
Переходной процесс |
||
|
с оптимальными настройками |
с увеличенными на |
с уменьшенными на 20% настройками ПИД-регулятора |
|
|
Максимальное динамическое отклонение ΔТ1, ºС |
2,2 |
2 |
2,35 |
|
Статическая ошибка ΔТст,% |
0 |
0 |
0 |
|
Время регулирования tр, с |
500 |
900 |
700 |
Переходной
процесс с оптимальными настройками лучше, чем с увеличенными и уменьшенными
настройками, так как при изменении настроек
ПИД-регулятора ухудшаются показатели качества, а именно, увеличивается время
регулирования и максимального динамического отклонения.
3.6 Построение переходного процесса в АСР при возмущении по заданию
Переходной процесс по заданию представлен на рисунке 3.11
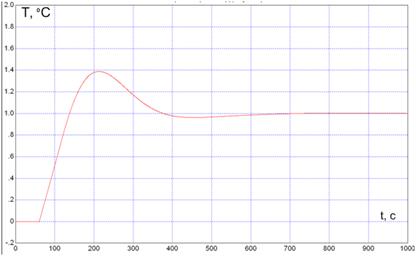
Рисунок 3.11 – Переходный процесс в системе при возмущении по заданию
Определим параметры переходного процесса (рисунок 3.11):
- максимальное динамическое отклонение, ΔТ1 = 1,4 ºС;
- статическая ошибка, ΔТст = 0;
- время регулирования, tр = 500 с.
3.7 Проверка системы на грубость
Зачастую параметры объекта управления изменяются во времени. Поэтому
необходимо проверять рассчитанную систему на нечувствительность (грубость) к возможным вариациям параметров системы для наихудших условий. Для проверки нашей системы специально изменим её параметры, а именно, увеличим их на 20 %, и посмотрим, как будет выглядеть переходной процесс в системе. Конечно, нас будут интересовать показатели качества переходного процесса, то есть качество регулирования системы, при изменения параметров объекта, ведь изменять мы будем именно их: Коб и τоб. На рисунке 3.12 представлен переходной процесс с увеличенными параметрами объекта.
Определяем по графику параметры переходного процесса с увеличенными на 20 % Коб и τоб:
- максимальное динамическое отклонение, ΔТ1 = 2,75;
- статическая ошибка, ΔТст = 0;
- время регулирования, tр = 3600 с.
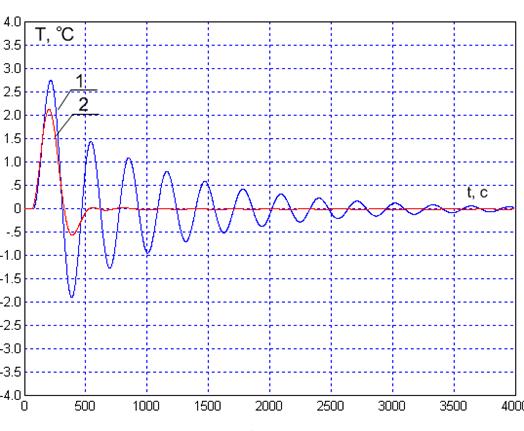
1 – с увеличенными на 20 % параметрами объекта (Коб=41,1, τоб=81
с);
2 – с исходными параметрами объекта (Коб=34,25 τоб=67,5 с)
Рисунок 3.12 – Переходные процессы в системе при проверке на робастность
Из рисунка 3.12 видно, что при изменении коэффициента усиления и времени запаздывания качество процесса регулирования сильно ухудшается, но система остается устойчивой, поэтому система является грубой к изменению параметров объекта.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.