Схема, изображенная на рисунок 5, б – последовательно-параллельная. В ней применены два дифманометра (датчика): один для регулирования процесса, другой для контроля с помощью автоматического регистрирующего прибора БП. Недостатком этой схемы является увеличение числа первичных преобразователей. Кроме того, подать сигнал на вход УВМ затруднительно.
Схема, изображенная на рисунок 5, в (параллельная схема) не обладает присущими схемам на рисунок 5, а и б недостатками. Сигнал с выхода датчика подается на вход нормирующего преобразователя НП, с которого, в свою очередь, он поступает на все необходимые контролирующие и регулирующие приборы, включая УВМ.
В настоящее время такие схемы проектируются с параллельным подключением приборов и устройств в АСР. Достоинство данных схем заключается в сведении числа необходимых приборов к минимуму, развязке (независимости) приборов друг от друга, что повышает надежность системы, уменьшает трудоемкость обслуживания, делает ее универсальной и т.д. При использовании первичных преобразователей с унифицированным сигналом нормирующий преобразователь не нужен.
Большое значение имеет способ подключения приборов к выходу нормирующего преобразователя. Если ток с выхода нормирующего преобразователя 0-5 мА последовательно обтекает все проводники, то используется дополнительное сопротивление для согласования величины нагрузки в выходной цепи нормирующего преобразователя, которая должна быть равна 2,5 кОм.
В настоящее время широко распространены нормирующие преобразователи типов НП-ТЛ1М(Ш72, НП-02), НП-СЛ1М(Ш-71, Ш-79), НП-Р1М(Ш-73), НП-П3(Ш-70), а также преобразователи переменного тока (Е824) и напряжения (Е825).
В качестве вторичных приборов для контроля и регистрации унифицированного токового сигнала используются самопишущие миллиамперметры типов КСУ2 и КСУЗ, а также регистрирующие приборы типов А542, А543, «Диск-250», РП160, ФЩЛ и т. д.
Самопишущие миллиамперметры представляют собой обычные потенциометры, предназначенные для косвенного измерения тока в соответствующей цепи (по падению напряжения на эталонном манганиновом сопротивлении, которое включается параллельно входу потенциометра).
В качестве регулирующих приборов в современных АСР используют регуляторы типа Р27, Р28, «МЕТАКОН», РС-29 и т. п., а так же регулирующие устройства, встроенные во вторичные приборы.
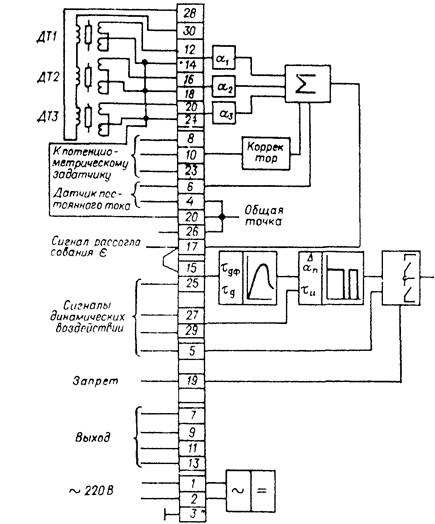
Регулирующий блок Р27 (рисунок 6) производит суммирование унифицированных входных сигналов постоянного тока (допускается также подключение дифференциально-трансформаторных датчиков). На выходе блока нормируется выходной сигнал (импульсный) ±24В для воздействия на исполнительное устройство в соответствии с одним из законов регулирования: П-, ПИ-, ПИД. Диапазон изменения коэффициента пропорциональности составляет 0,3-100, постоянной времени интегрирования 0.5-50, 5-500, 20-2000 с и постоянной времени дифференцирования 0-10, 0-100, 0-600 с в зависимости от модификации блока. На рис. 6 представлена схема внешних соединений для блока P27.1.
 Регулирующий блок Р28 осуществляет ввод и вывод
входных сигналов 0-5 мА и 0-10 В, их масштабирование, демпфирование, Формирование
совместно с исполнительным механизмом постоянной скорости ПИ-закона регулирования,
аналоговую и дискретную автоподстройку коэффициента передачи и постоянной
времени интегрирования. В остальном он идентичен регулирующему блоку Р27.
Регулирующий блок Р28 осуществляет ввод и вывод
входных сигналов 0-5 мА и 0-10 В, их масштабирование, демпфирование, Формирование
совместно с исполнительным механизмом постоянной скорости ПИ-закона регулирования,
аналоговую и дискретную автоподстройку коэффициента передачи и постоянной
времени интегрирования. В остальном он идентичен регулирующему блоку Р27.
Мощность сигнала на выходе регулирующих приборов недостаточна для управления исполнительным механизмом поэтому вначале его усиливают. Осуществляется это с помощью пусковых устройств. Они подразделяются на две основные группы - с контактным и бесконтактным управлением.
К контактным относится реверсивный магнитный пускатель с тормозным устройством ПМРТ-69; к бесконтактным - тиристорные усилители У101, ПБР-2, У23 и ФЦ.
Сигналы, выработанные регулирующими приборами после усиления, поступают на исполнительные механизмы. Наиболее распространенными из них являются исполнительные механизмы типа МЭО.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.