


Лабораторная работа №4п (6 часов)
ИЗУЧЕНИЕ ПНЕВМАТИЧЕСКОГО РЕГУЛЯТОРА ТИПА ПР3.21 СИСТЕМЫ "СТАРТ"
1. Цель работы
1.1.Ознакомиться с конструкцией и принципом действия регулятора ПР3.21.
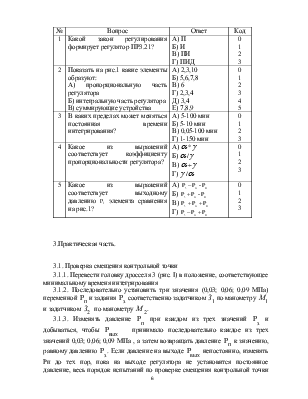
1.2. Произвести проверку смещения контрольной точки, градуировки органа настройки пределов пропорциональности и органа настройки времени интегрирования регулятора.
1.3.Построить статические характеристики по результатам проверки регулятора.
2. Назначение» устройство и принцип действия регулятора типа ПР3.21.
Пневматический регулятор ПР3.21 входит в систему "Старт", созданную на базе элементов УСЭППА, и предназначен для реализации пропорционально- интегрального закона регулирования, действие его основано на принципе компенсации сил.
Настроенный на прямое регулирование регулятор при отклонении регулируемой переменной от заданного значения непрерывно производит пропорционально-интегральное воздействие на исполнительный механизм, причем знаки изменения сигнала по переменной и выходного сигнала регулятора совпадают. При настройке на обратное регулирование влияние отклонения переменной от задания на выходной сигнал по абсолютной величине остается тем же, но знаки изменения выходного сигнала и сигнала по переменной противоположны.
Регулятор
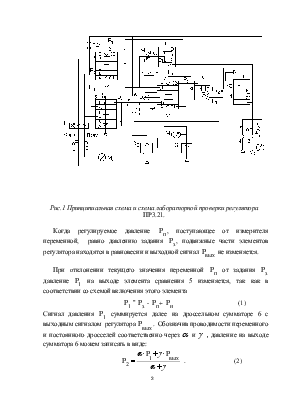
ПР3.21 (рис.1) состоит из трех пятимембранных элементов сравнения 2,5 и 7;
усилителя мощности 8 ; выключающих реле 9 и 10 , емкости 4; регулируемого
дросселя 3 и дроссельного сумматора 6 ;состоящего из переменного и постоянного
сопротивлений. В его состав также входят два постоянных дросселя ![]() и
и ![]() ,
переключатель П, с помощью которого регулятор настраивается на прямое и
обратное регулирование.
,
переключатель П, с помощью которого регулятор настраивается на прямое и
обратное регулирование.
Элементы 5-8 формируют пропорциональную, а элементы 2-4 интегральную составляющие.
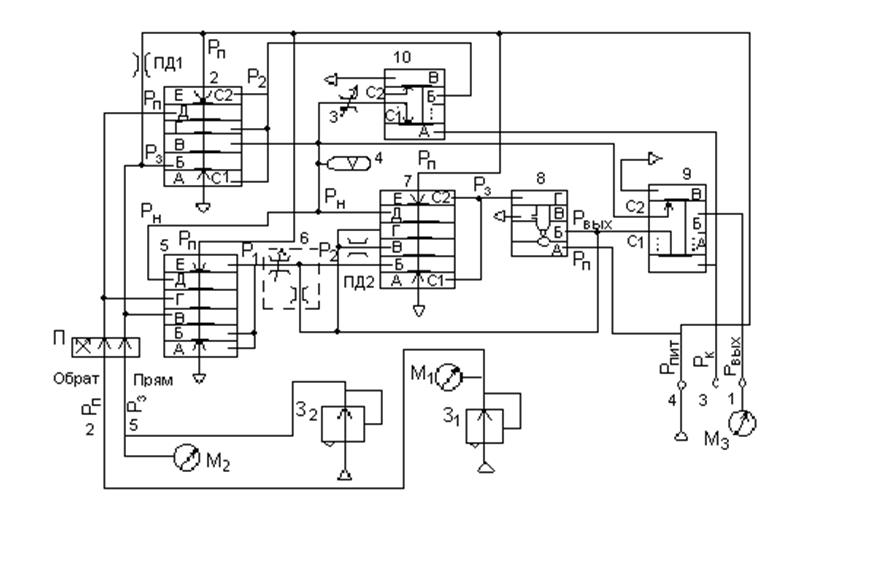
Рис.1 Принципиальная схема и схема лабораторной проверки регулятора ПР3.21.
Когда
регулируемое давление ![]() , поступающее от измерителя
переменной, равно давлению задания
, поступающее от измерителя
переменной, равно давлению задания ![]() , подвижные части
элементов регулятора находятся в равновесии и выходной сигнал
, подвижные части
элементов регулятора находятся в равновесии и выходной сигнал ![]() не изменяется.
не изменяется.
При
oтклонении
текущего значения переменной ![]() от задания
от задания ![]() давление
давление ![]() на
выходе элемента сравнения 5 изменяется, так как в соответствии со схемой
включения этого элемента
на
выходе элемента сравнения 5 изменяется, так как в соответствии со схемой
включения этого элемента
![]() =
= ![]() -
- ![]() +
+ ![]() (1)
(1)
Сигнал
давления ![]() суммируется далее на дроссельном сумматоре
6 с выходным сигналом регулятора
суммируется далее на дроссельном сумматоре
6 с выходным сигналом регулятора ![]() . Обозначив
проводимости переменного и постоянного
дросселей соответственно через
. Обозначив
проводимости переменного и постоянного
дросселей соответственно через![]() и
и ![]() , давление на выходе
сумматора 6 можем записать в виде:
, давление на выходе
сумматора 6 можем записать в виде:
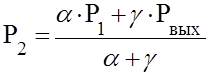 . (2)
. (2)
В
установившемся режиме при неизменяющемся сигнале ![]() усилия,
развиваемые в камерах В и Г, взаимно компенсируются, так как в эти камеры
подается одно и тоже давление
усилия,
развиваемые в камерах В и Г, взаимно компенсируются, так как в эти камеры
подается одно и тоже давление ![]() . Поэтому равновесие
элемента соответствует условию
. Поэтому равновесие
элемента соответствует условию ![]() =
=![]() .
Однако даже при небольшом изменении давления
.
Однако даже при небольшом изменении давления ![]() ,
возникающего в результате отклонения
,
возникающего в результате отклонения ![]() от задания и
соответствующего изменения
от задания и
соответствующего изменения ![]() , произойдет резкое и
противоположное до знаку изменение давления
, произойдет резкое и
противоположное до знаку изменение давления ![]() на
выходе элемента 7, обусловленное включением последнего по схеме усилителя с
большим коэффициентом усиления.
на
выходе элемента 7, обусловленное включением последнего по схеме усилителя с
большим коэффициентом усиления.
Через
усилитель мощности 8 это изменение давления ![]() передается
на выход регулятора и под действием изменения выходного давления
передается
на выход регулятора и под действием изменения выходного давления ![]() изменяется до тех пор, пока снова не
станет равным
изменяется до тех пор, пока снова не
станет равным ![]() .
.
Подставив
в выражение (2) вместо![]() -
- ![]() , а вместо
, а вместо ![]() его
значение из выражения(1), получим уравнение пропорциональной
составляющей регулятора
его
значение из выражения(1), получим уравнение пропорциональной
составляющей регулятора
![]() (3)
(3)
где![]() - коэффициент пропорциональности
регулятора, величина, обратная пределам пропорциональности (диапазону
дросселирования)
- коэффициент пропорциональности
регулятора, величина, обратная пределам пропорциональности (диапазону
дросселирования) ![]() и равная отношению
проводимостей регулируемого
и равная отношению
проводимостей регулируемого ![]() и постоянного
и постоянного ![]() росселей дроссельного сумматора.
Настраивается
росселей дроссельного сумматора.
Настраивается ![]() изменениeм проводимости
дросселя сумматора 6. При закрытом дросселе
изменениeм проводимости
дросселя сумматора 6. При закрытом дросселе ![]() минимален
и наоборот.
минимален
и наоборот.
Промышленностью выпускаются регуляторы со следующими диапазонами изменения пределов пропорциональности в %: 5-100;10-300;40-500;100-1000;150-1500;500-3000.
Элементы,
формирующие интегральную составляющую, функционируют следующий образом. Когда
переменная равна заданию (![]() =
=![]() ),
давление на входе инерционного звена (дроссель 3 - емкость 4)
),
давление на входе инерционного звена (дроссель 3 - емкость 4) ![]() и на его выходе
и на его выходе ![]() oдинаковы ,а
мембранный блок элемента 2 находится в равновесии. При отклонении переменной от
задания (
oдинаковы ,а
мембранный блок элемента 2 находится в равновесии. При отклонении переменной от
задания (![]() ¹
¹![]() ) элемент 2, включенный по cxемe усилителя,
резко меняет давление на выходе
) элемент 2, включенный по cxемe усилителя,
резко меняет давление на выходе ![]() и возникающая разность
давлений (
и возникающая разность
давлений (![]() -
- ![]() )
приводит к изменению давления
)
приводит к изменению давления ![]() . Последнее будет
изменяться до тех пор, пока не исчезнет перапад давление на дросселе 3, что
возможно лишь при равенстве регулируемой и заданной величины.
. Последнее будет
изменяться до тех пор, пока не исчезнет перапад давление на дросселе 3, что
возможно лишь при равенстве регулируемой и заданной величины.
Математические условия работы элемента 2 можно представить выpaжeнием
![]() , (4)
, (4)
а инерционногого звена, "дроссель 3 - емкость 4" - уравнением
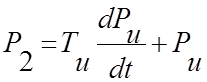 . (5)
. (5)
Подставив (5) в (4) и решив последнее относительно ![]() , получим
, получим
 , (6)
, (6)
где
![]() - пocтоянная времени
интегрирования, назначение которой может меняться с пoмощью дросселя 3
в интервале 0,05-100 мин, причем последнее значение соответствует закрытому
положению дросселя 3, когда регулятор практически можно считать
пропорциональным. Минимальное время интегрирования соответствует полностью
открытому дросселю.
- пocтоянная времени
интегрирования, назначение которой может меняться с пoмощью дросселя 3
в интервале 0,05-100 мин, причем последнее значение соответствует закрытому
положению дросселя 3, когда регулятор практически можно считать
пропорциональным. Минимальное время интегрирования соответствует полностью
открытому дросселю.
Зaвисимость
выходного сигнала регулятора от сигнала рассогласования переменной и задания
можно получить, подставив в выражение (3) значение ![]() из
уравнения6:
из
уравнения6:
 .
(7)
.
(7)
В конструкции регулятора предусмотрено два
отключающих реле -9 и 10. При автоматическом регулировании давление ![]() на выключающем реле равно 0. В этом
случае сопло С1 под действием пружины открыто и выход усилителя 8 через это
сопло элемента 9 подключен к штуцеру (1) регулятора, а выход элемента 2 через
сопло С1 элемента 10 - к входу инерционного звена (дроссель 3 - емкость 4).
на выключающем реле равно 0. В этом
случае сопло С1 под действием пружины открыто и выход усилителя 8 через это
сопло элемента 9 подключен к штуцеру (1) регулятора, а выход элемента 2 через
сопло С1 элемента 10 - к входу инерционного звена (дроссель 3 - емкость 4).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.