быть линеаризована в определенном интервале изменения x1, x2,…, xk.
Уравнения динамики характеризуют поведение выходной координаты объекта y в переходном режиме работы, т.е. при изменении какой-либо из координат x1, x2,…, xk. Динамика объекта описывается дифференциальными уравнениями в полных или частных производных (реже — интегральными уравнениями).
Составление математического описания технологического объекта является достаточно трудной задачей, однако без знания уравнений статики и динамики невозможно построение качественно работающей системы автоматического регулирования.
При составлении математического описания объекта управления определяются его статические (коэффициент усиления - Kоб, а иногда и вид статической зависимости) и динамические (запаздывание - t, постоянные времени – T ) параметры.
Большинство объектов цветной металлургии с достаточной для инженерных расчетов точностью можно описать линейными дифференциальными уравнениями с запаздывающим аргументом.
Кроме того, для описания динамических свойств объектов управления широкое применение находят передаточные функции, частотные и переходные характеристики [1.2, с. 90-95; 1.3, с. 226-239; 1.4, с. 87-96, 103-108; 1.5, с. 8-19].
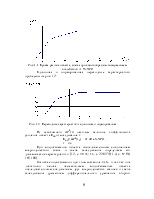
Переходная характеристика отражает процесс изменения выходной величины системы при подаче на ее вход ступенчатого возмущения. В этом случае ее принято называть кривой разгона - h(t).
Существуют аналитические и экспериментальные методы определения динамических характеристик. Составление уравнения аналитическим путем возможно только для относительно простых объектов, процессы в которых достаточно хорошо изучены. Более сложные объекты исследуют экспериментально.
Обычно при проведении эксперимента снимается несколько переходных функций. Переходные функции hg(t) при g= 1, 2, ..., q, неискаженные помехами, строят в одном масштабе на графике. Так как при проведении эксперимента амплитуды Ag входного сигнала были различны, то следует определить единичные переходные функции hоg(t) по формуле:
|
hоg(t) = hg(t)/Ag . |
(1.1) |
Если разброс между функциями hоg(t) незначителен (менее 3%), то для последующей обработки выбирается любая из полученных переходных функций. В противном случае производится усреднение hоg(t) по множеству номеров g, то есть находят усредненную единичную переходную функцию
|
|
(1.2) |
Обычно
математическое описание объекта управления с самовыравниванием осуществляют по
нормированной переходной функции hн (t), (![]() ):
):
|
|
или
|
|
где
hоg(Tу), ![]() (Tу)
- значения единичной и усредненной единичной переходных функций при времени
установления (t у), соответственно.
(Tу)
- значения единичной и усредненной единичной переходных функций при времени
установления (t у), соответственно.
По переходным функциям определяют величины: коэффициент усиления объекта (Kоб), постоянные времени объекта (T), запаздывание (t).
Коэффициент усиления объекта с самовыравниванием:
Kоб =hоg(t у) или Kоб
= ![]() ( t у).
( t у).
Величину запаздывания t находят как отрезок времени, внутри которого выполняется неравенство 0 ≤ hоg(t) < D , где величина D обычно составляет
(0,01÷0,02) ![]() ( t у).
( t у).
Часто при использовании динамических характеристик промышленных объектов измеряют не выходную координату h (t), а сумму ее с некоторой случайной функцией (помехой) C (t):
|
Z(t) = h(t) + C(t). |
(1.3) |
Определение по Z(t) коэффициентов дифференциального уравнения возможно лишь после соответствующей обработки, заключающейся в выделении из функции Z(t) истинной h (t).
Возможен
следующий путь нахождения переходной функции Zg(t);
надо снять q экспериментальных переходных функций Zg(t),
где g = 1, 2, ..., q, и найти оценку
математического ожидания ![]() *Z
g(t) по множеству номеров g.
Так как C(t) стационарна и ее математическое ожидание равно нулю,
то при достаточно большом q получим:
*Z
g(t) по множеству номеров g.
Так как C(t) стационарна и ее математическое ожидание равно нулю,
то при достаточно большом q получим:
|
|
Однако, для получения более или менее достоверных результатов число экспериментальных переходных функций q должно быть более 40! Поэтому большой практический интерес представляют методы сглаживания экспериментальной переходной функции. Один из таких методов - сглаживание скользящим усреднением. Заключается он в последовательном сглаживании (усреднении) ординаты Zi при i = 0, 1, ..., n на некотором интервале времени l∙Dt, где l - любое целое число
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.