 (9)
(9)
Результаты расчетов приведены в таблице 5, а график аппроксимирующей кривой показан на рисунке 4.5.
Таблица 5 – Ординаты переходных функций
|
t, с |
∆Тн(t) |
∆Тна1(t) |
|
|
0 |
0 |
0 |
0 |
|
20 |
0 |
0 |
0 |
|
30 |
0,0702 |
0,04135 |
0,00083 |
|
40 |
0,2007 |
0,25530 |
0,00298 |
|
50 |
0,4174 |
0,42150 |
0,00002 |
|
60 |
0,5652 |
0,55061 |
0,00021 |
|
80 |
0,7304 |
0,72881 |
0,00000 |
|
100 |
0,8522 |
0,83635 |
0,00025 |
|
120 |
0,9217 |
0,90125 |
0,00042 |
|
180 |
0,9826 |
0,97830 |
0,00472 |
|
220 |
0,9913 |
0,99210 |
0,00052 |
|
300 |
1 |
0,99895 |
0,02289 |
Рисунок 4.5 – Аппроксимация переходной функции решением дифференциального уравнения первого порядка
По данным таблицы 11 рассчитываем среднеквадратичную ошибку аппроксимации δ:
|
|
Погрешность аппроксимации удовлетворительная (δ ≤ 3 %). Поэтому окончательно принимаем аппроксимацию объекта дифференциальным уравнением первого порядка.
4.2 Выбор регулятора
Тип регулятора выбираем из таблицы 2.1 [1] по отношению:
![]() .
.
Так
как 0,2 < ![]() < 1, выбираем непрерывный тип
регулятора.
< 1, выбираем непрерывный тип
регулятора.
Для выбора закона регулирования рассчитываем динамический коэффициент регулирования:
![]() .
.
По графику на рисунке 2.3в [1] определяем, что только ПИД-регулятор может обеспечить значение Rд=0,133 ниже расчётного для требуемого вида переходного процесса.
По графику на рисунке 2.4в [1] находим для
ПИД-регулятора отношение ![]() , откуда время
регулирования tр = 10∙τоб = 10∙28,328
= 283,28 с., что больше допустимого времени регулирования tр ≤ 250 с, и так
как мы выбрали самый сложный закон регулирования (ПИД-закон), который
обеспечивает наименьшее время регулирования из возможного, окончательно
выбираем его.
, откуда время
регулирования tр = 10∙τоб = 10∙28,328
= 283,28 с., что больше допустимого времени регулирования tр ≤ 250 с, и так
как мы выбрали самый сложный закон регулирования (ПИД-закон), который
обеспечивает наименьшее время регулирования из возможного, окончательно
выбираем его.
Расчет настроек выбранного регулятора выполняют следующим способом:
- графо-аналитическим на основе амплитудно-фазовой характеристики;
- объекта и М-критерия (показателя колебательности);
- по расширенным амплитудно-фазовым характеристикам;
- по приближенным формулам;
- с помощью математического моделирования.
На практике настройки регуляторов определяют обычно по приближённым формулам (таблица 2.2 [1]), а затем производят их уточнение.
Настройки ПИД-регулятора по приближённым формулам имеют следующие значения:
 %ХРО/ºС,
%ХРО/ºС,
![]() с,
с,
![]() с.
с.
Уточнение настроек регулятора произведём в среде MATLAB 6.5, с помощью встроенного пакета Simulink. Модель автоматической системы регулирования в Simulink представлена на рисунке 4.6.
Для задания настроек встроенного в Simulink ПИД-регулятора необходимо перевести значения времени интегрирования и времени предварения в значения коэффициентов интегральной и дифференциальной составляющих ПИД-закона регулирования:
- коэффициент пропорциональной составляющей p = Kп = 0,5222;
- коэффициент интегральной составляющей i = Kр/Tи = 0,014;
- коэффициент дифференциальной составляющей d = Kр∙Tд = 7,396.
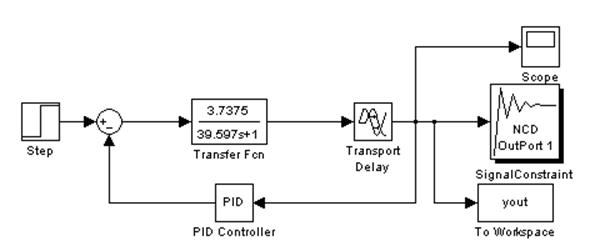
Рисунок 4.6 – Модель автоматической системы регулирования в Simulink
При задании в командной строке MATLAB 6.5 значений коэффициентов составляющих закона регулирования:
>> p=0,5222;
>> i=0,014;
>> d=7,396.
При моделировании в Simulink получается переходной процесс, изображённый на рисунке 4.7.
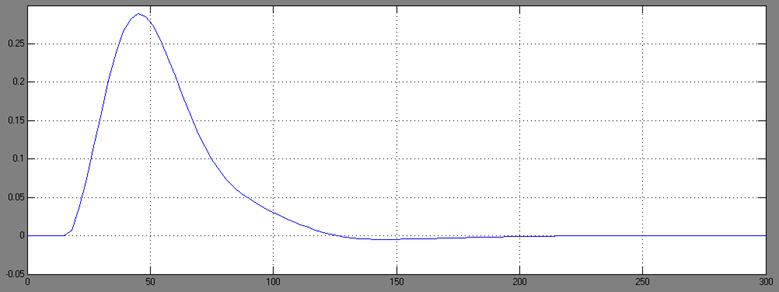
Рисунок 4.7 – Переходной процесс при исходных настройках регулятора
Для
оптимизации настроек регулятора необходимо в блоке Signal
Constraint задать ограничения на вид переходного процесса, указать параметры p,
i и d в качестве настраиваемых. После этого можно запустить процесс
оптимизации. В результате получается переходный процесс, изображённый на рисунке
4.8, по заданию процесс с ![]() .
.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.
 %.
%.