Участок низких частотхарактеризует статические свойства системы, её точность в установившемся режиме.
Для статических систем участок низких частот желаемой ЛАЧХ представляет собой прямую, параллельную оси частот и отстоящую от нее на величину 20∙1g(K). Коэффициент К определяют по формуле:
 ,
,
где ∆% — заданная статическая точность системы, %.
 .
.
Для астатической системы участок низких частот представляет собой прямую с наклоном минус 20∙ν дб/дек, проходящую через точку с координатами (1; 20∙1g(K)), где ν – порядок астатизма системы.
Участок средних частотхарактеризует динамические свойства системы, её устойчивость и качество процесса регулирования.
Желаемая ЛАЧХ на средних частотах представляет собой прямую с наклоном минус 20 дб/дек, проходящую через частоту среза ωс, что обеспечивает необходимый запас по фазе. Требуемая частота может быть приближенно оценена по формуле:
 ,
,
где tp –заданное время переходного процесса; n -коэффициент, определяемый по номограмме по заданной величине перерегулирования σ, %.
Этот участок ограничен запасом устойчивости по амплитуде (+∆L), который определяют исходя их найденных Pmin и Рmах по круговым диаграммам, построенным в логарифмическом масштабе.
![]() ,
, ![]() ,
, ![]() .
.
Сопряжение участков низких и средних частот производится за пределами коридора +∆L наклонами минус 40; минус 60 дб/дек и т.д.
Участок высоких частотне корректируют. Желаемую ЛАЧХ на этом участке строят либо параллельно ЛАЧХ некорректированной системы, либо она полностью с ней совпадает.
Сопряжение участков высоких и средних частот производят стандартными наклонами минус 40; минус 60 дб/дек и т.д.
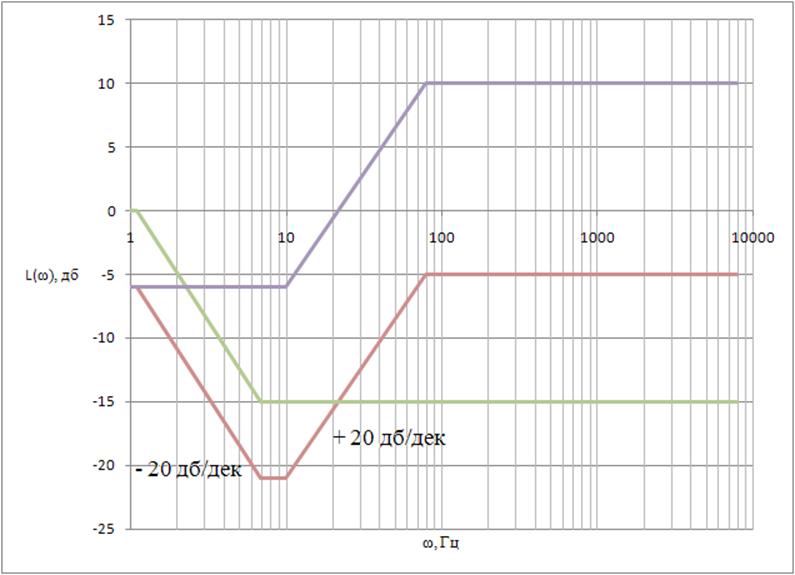
Строим график ЛАЧХ желаемой системы (рисунок 16).
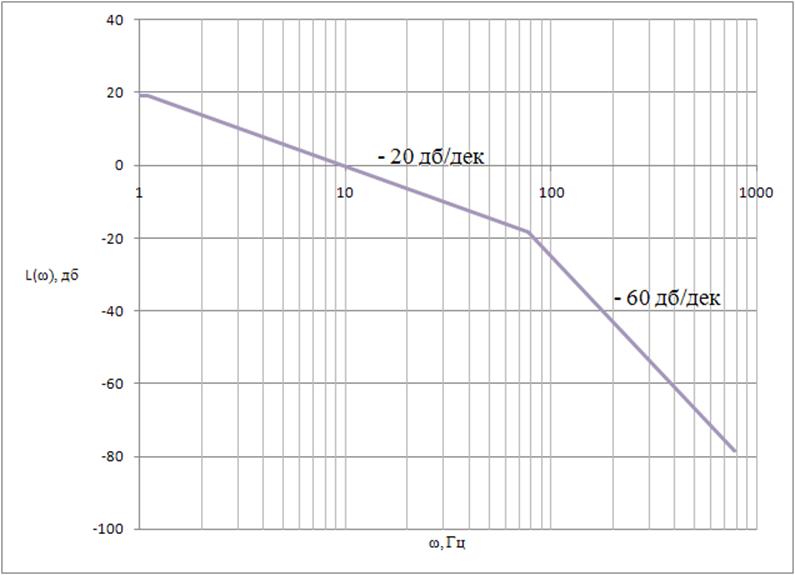
Рисунок 16 – ЛАЧХ желаемой системы
2.3 Нахождение ЛАЧХ последовательного корректирующего устройства
При выборе схемы включения корректирующего устройства (КУ) в общую схему некорректированной системы руководствуются следующими требованиями:
• необходимой точностью работы системы;
• необходимым запасом устойчивости по амплитуде и фазе;
• необходимым перерегулированием и временем переходного процесса.
Выполняя синтез, вначале определяют требуемое значение передаточной функции последовательного КУ. Затем выясняют, при каких значениях передаточных функций параллельного и прямого параллельного КУ будет получен тот же эффект. Далее решают, какое КУ целесообразно использовать.
ЛАЧХ последовательного КУ находят путем графического вычитания ЛАЧХ некоррелированной систем из желаемой ЛАЧХ:
![]() .
.
Построение ЛАЧХ корректирующего устройства.
Строим график ЛАЧХ корректирующего устройства (рисунок 17).
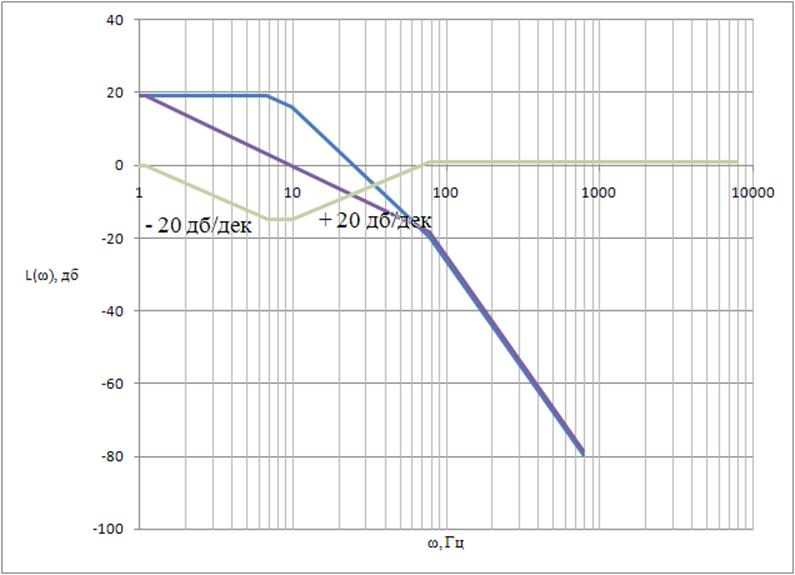
Рисунок 17 – ЛАЧХ корректирующего устройства
2.4 Выбор корректирующего устройства, определение передаточной функции и расчёт параметров корректирующей цепочки
С учетом вида полученной ЛАЧХ по справочнику выбирают КУ. Наиболее часто используемые пассивные четырехполюсники постоянного тока, применяемые для коррекции. Затем находят передаточную функцию КУ и рассчитывают его параметры.
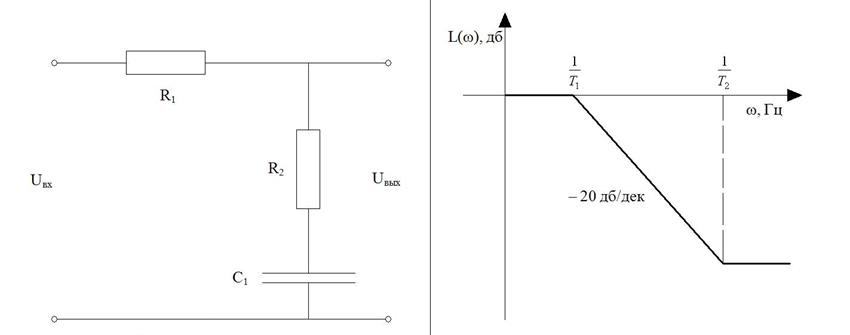
Рисунок 18 –
Схема корректирующего устройства и его ЛАЧХ
Передаточная функция корректирующего устройства:
 ,
,
где:
![]() ,
, ![]() .
.
Нахождение постоянных времени:
 ,
,  .
.
Нахождение параметров:
![]() ,
, ![]() ,
, ![]() .
.
Нахождение передаточной функции корректирующего устройства:
Строим график ЛАЧХ корректирующего устройства (рисунок 19).
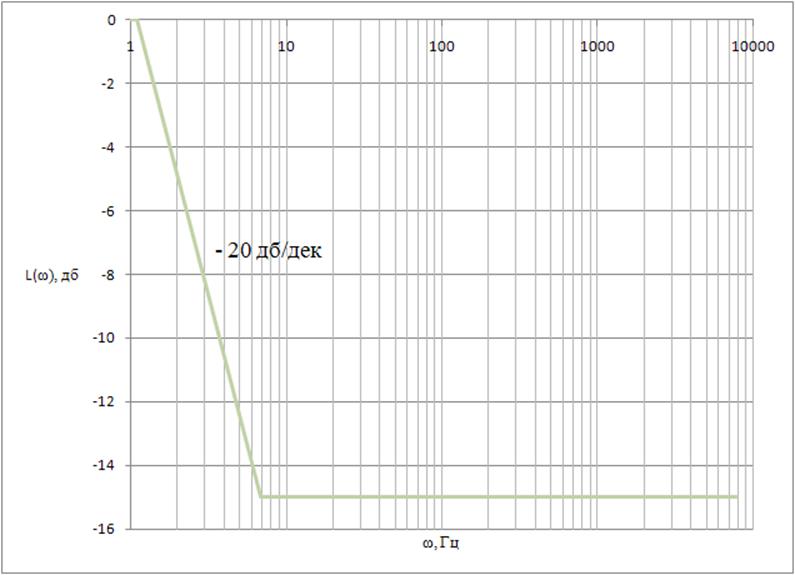
Рисунок 19 –
ЛАЧХ корректирующего устройства
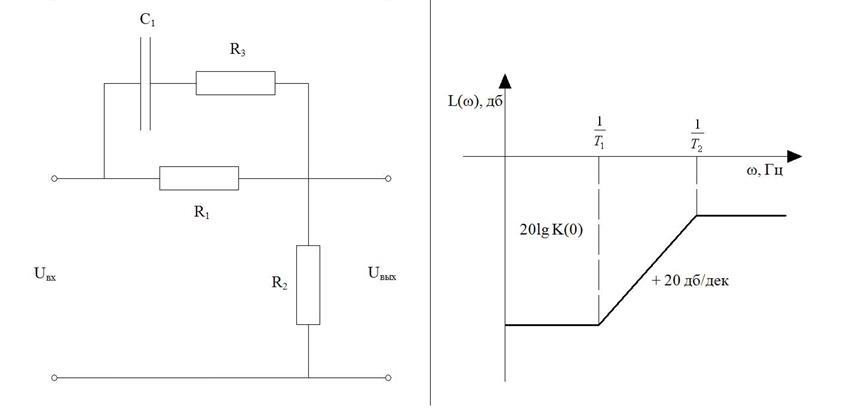
Рисунок 20 – Схема корректирующего устройства и его ЛАЧХ
Передаточная функция корректирующего устройства:
 ,
,
где:
![]() ,
,  ,
,  .
.
Нахождение постоянных времени:
 ,
,  .
.
Нахождение параметров:
![]() ,
, ![]() ,
, ![]() ,
, ![]() .
.
Нахождение передаточной функции корректирующего устройства:
Строим график ЛАЧХ корректирующего устройства (рисунок 21).
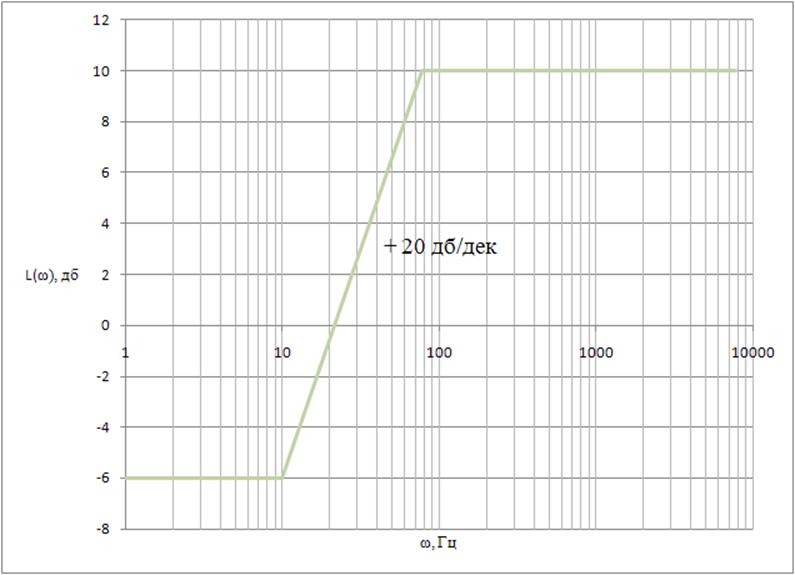
Рисунок 21 – ЛАЧХ корректирующего устройства
Нахождение суммарной ЛАЧХ корректирующего устройства.
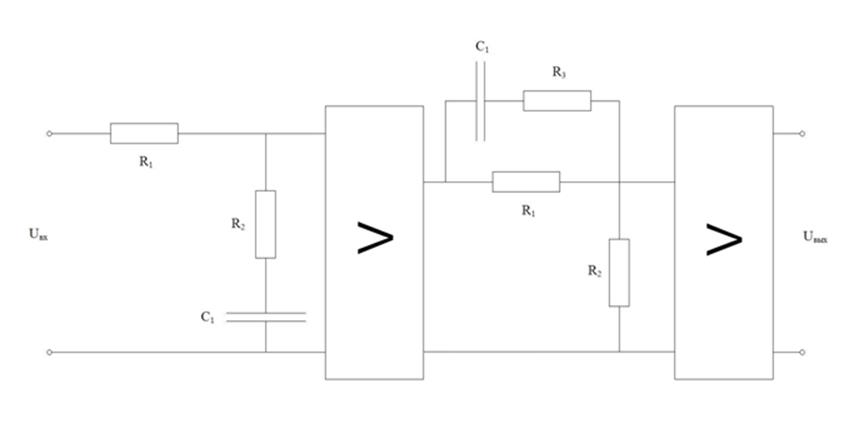
Рисунок 22 – Схема корректирующего устройства
Строим график суммарной ЛАЧХ корректирующего устройства (рисунок 23).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.