Федеральное государственное образовательное учреждение
высшего профессионального образования
«СИБИРСКИЙ ФЕДЕРАЛЬНЫЙ УНИВЕРСИТЕТ»
___________Химико-Металлургический__________
институт
_____Автоматизация производственных процессов____
кафедра
ОТЧЕТ ПО ЛАБОРАТОРНОЙ РАБОТЕ № 3
Исследование устойчивости и качества линейной системы
____________автоматического регулирования________________
Преподаватель __________ __Осипова В.А.__
подпись, дата инициалы, фамилия
Студент ____МФ 06-09_____ __________ __Дудкина Н.И._
код (номер) группы подпись, дата инициалы, фамилия
Красноярск, 2009
Содержание
|
1 |
Задание………………………………………………………………………. |
3 |
|
2 |
Практическая часть…………………………………………………………. |
3 |
|
2.1 |
Расчет области возможных значений коэффициента Ku, при котором выполняется условие устойчивости САР…………………………………. |
3 |
|
2.1.1 |
Расчет для интегрального регулятора (И)………………………………… |
3 |
|
2.1.2 |
Расчет для пропорционально-интегрального (ПИ) регулятора…………. |
4 |
|
2.2 |
Расчет оптимальных значений коэффициента Ku для И и ПИ-регуляторов…………………………………………………………………. |
4 |
|
2.3 |
Расчет передаточной функции замкнутой системы с И-регулятором. При использовании оптимального значения Ku для И-регулятора……… |
4 |
|
2.4 |
Расчет передаточной функции замкнутой системы с ПИ-регулятором, при использовании оптимального значения Ku для ПИ-регулятора……. |
4 |
|
2.5 |
Экспериментальная проверка выполнения условий устойчивости для И и ПИ-регуляторов при Ku ,взятом из области устойчивости…………….. |
5 |
|
2.6 |
Экспериментальная проверка выполнения условий устойчивости для И и ПИ-регуляторов при Ku = Kuопт. …………………………………............ |
6 |
|
2.7 |
Экспериментальное исследование для САР с И и ПИ-регулятором переходного процесса при различных значениях Ku………………………… |
7 |
|
2.8 |
Проверка системы на устойчивость……………………………………….. |
10 |
|
2.9 |
Годограф Найквиста………………………………………………………... |
11 |
|
2.10 |
Годограф Михайлова……………………………………………………….. |
11 |
|
2.11 |
Исследование системы на устойчивость с помощью критерия устойчивости Гурвица……………………………………………………... |
11 |
|
2.12 |
График зависимости |
12 |
|
2.13 |
Графики
зависимости |
12 |
Цель работы: экспериментальное исследование статического и астатического регулирования. Теоретическое и экспериментальное исследование влияния отдельных параметров системы на устойчивость и точность работы системы. Определение оптимальных параметров управляющего устройства.
Задание
Вариант №21
Дано:
Ко=4, Т1=Т2=2 с.
Параметры передаточной функции регулятора приведены в таблице 1
Таблица 1
|
Тип регулятора |
Кп |
П |
от 0.05 до 1 с шагом 0,1 |
|
И |
0 |
|
ПИ |
1 |
Практическая часть
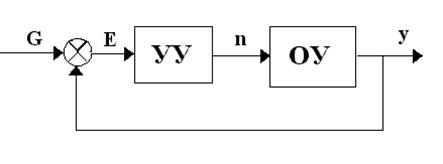
Структурная схема исследуемой системы приведена на рисунке 1.
|
|
|
Рисунок 1 - Структурная схема САР. |
1) Рассчитаем область возможных значений коэффициента Ku, при котором выполняется условие устойчивости САР.
а) Интегральный регулятор (И) имеет передаточную функцию:
 .
.
Область возможных значений постоянной времени интегратора определится неравенством:
б) Пропорционально-интегральный (ПИ) регулятор, имеет передаточную функцию:
 .
.
Область возможных значений постоянной времени интегратора определится неравенством:
2) Рассчитаем оптимальные значения коэффициента Ku для И и ПИ-регуляторов.
Для И-регулятора оптимальный коэффициент передачи интегрирующего блока равен:
Для ПИ-регулятора оптимальный коэффициент передачи интегрирующего блока равен:

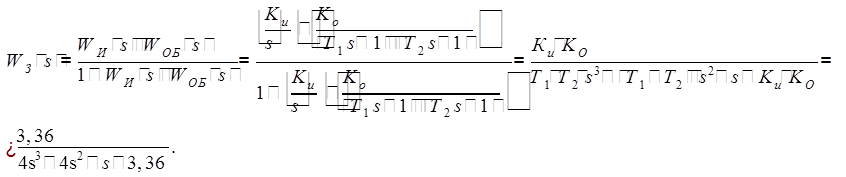
4) Рассчитаем передаточную функцию замкнутой системы с И-регулятором используя оптимальное значение Ku для И-регулятора.
5) Рассчитаем передаточную функцию замкнутой системы с ПИ-регулятором, используя оптимальное значение Ku для ПИ-регулятора.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.