Наличие этих особенностей дает возможность производить настройку главного и корректирующего регуляторов независимо друг от друга, как в простой одноконтурной САР. При этом для корректирующего регулятора объектом является опережающий участок Wоп(s), а для главного регулятора –весь управляющий канал объекта с передаточной функцией, равной произведению Wоп(s)*Wин(s) (в отличие от обычных каскадных схем, в которых при настройке главного регулятора приходится находить передаточную функцию эквивалентного объекта).
Другим достоинством данной схемы является повышение ее эксплуатационной надежности за счет того, что при отказе корректирующего регулятора или любого другого элемента внутреннего контура регулирования, а также компенсатора выход корректирующего регулятора может быть отключен от исполнительного механизма, и схема продолжает работать как простая одноконтурная САР с главным регулятором (причем без необходимости ее перенастройки, т.к. главный регулятор уже был настроен на передаточную функцию объекта по каналу управляющего воздействия).
|
|
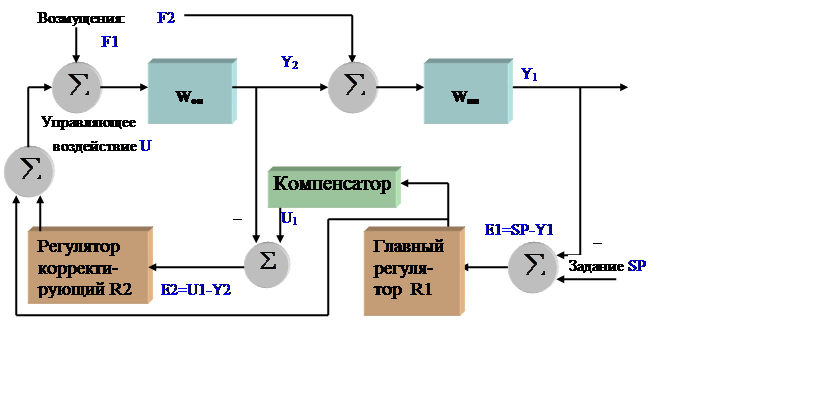
Рис. 2. Схема каскадной САР с односторонней автономностью
ПРАКТИЧЕСКОЕ ЗАДАНИЕ
1. Нажмите на пиктограмму ![]() , или выберите в меню File команду
Open. В появившемся
диалоговом окне выберите файл «Каскадная САР
с односторонней автономностью». Нажмите Открыть. VisSim спросит Вас сохранять ли изменения в Diagram1, нажмите НЕТ. Появится диаграмма каскадной САР с
односторонней автономностью.
, или выберите в меню File команду
Open. В появившемся
диалоговом окне выберите файл «Каскадная САР
с односторонней автономностью». Нажмите Открыть. VisSim спросит Вас сохранять ли изменения в Diagram1, нажмите НЕТ. Появится диаграмма каскадной САР с
односторонней автономностью.
2. Войдите в сложный блок «Wоп», нажмите правой кнопкой на блок Transfer Function и задайте в появившемся диалоговом окне передаточную функцию опережающего участка в соответствии с данными табл. 1. В блоке const задайте запаздывание. Выйдите из вложенного блока «Wоп» нажатием правой кнопки на чистом поле диаграммы.
3. Войдите в сложный блок «Wин», нажмите правой кнопкой на блок Transfer Function и задайте в появившемся диалоговом окне передаточную функцию инерционного участка в соответствии с данными табл. 1. В блоке const задайте запаздывание. Выйдите из вложенного блока «Wин» нажатием правой кнопки на чистом поле диаграммы.
4. Используя данные табл. 2 рассчитайте настройки ПИД-регулятора для апериодического процесса. Для регулятора «R2» настройки рассчитываются по передаточной функции W2, для «R1» по передаточной функции W1. Задайте настройки в блоках slider.
5. В диалоговом окне Simulation Properties в строке End установите время моделирования (3-4Тоб).
6. Задайте возмущение по нагрузке в блоке step.
7. Проведите моделирование (кнопка ![]() на панели инструментов).
на панели инструментов).
8. Войдите в сложный блок «идеальный апериодический процесс» и задайте вид идеального ПП.
9. Соедините блок «идеальный импульс» с графиком, проведите моделирование.
10. Проведите оптимизацию настроек ПИД-регулятора. Для этого установите флаг в строке Perform Optimization меню Optimization Setup. Запустите моделирование. Добейтесь приемлемого качества регулирования.
11. Задайте возмущение по заданию. Повторите пункты 7-10. В блоке «идеальный апериодический процесс» наклон должен быть равен нулю, а амплитуда 1.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.