



Федеральное государственное образовательное учреждение высшего профессионального образования
«Сибирский федеральный университет»
ИНСТИТУТ ЦВЕТНЫХ МЕТАЛЛОВ И ЗОЛОТА
Факультет металлургии
Кафедра АПП
Специальность 220301
Группа АМЦ 03-1
ОТЧЕТ О ЛАБОРАТОРНОЙ РАБОТЕ № 2
Изучение пакета Simulink системы MATLAB для
моделирования, имитирования и анализа систем управления
Преподаватель _____________ доцент, к.т.н. А. А. Буралков
(подпись, дата)
Разработал студент _____________ М. В. Баранов
(подпись, дата)
Красноярск, 2007 г.
|
№ варианта |
Параметры объекта регулирования |
|||
|
Kоб |
T1об, с |
Т2об, с |
tоб, с |
|
|
2 |
1,1 |
23 |
7 |
2 |
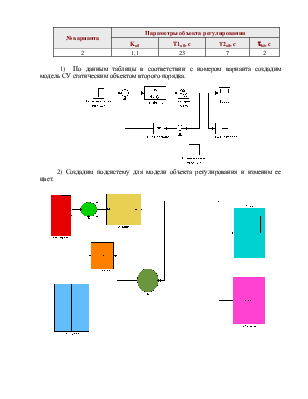
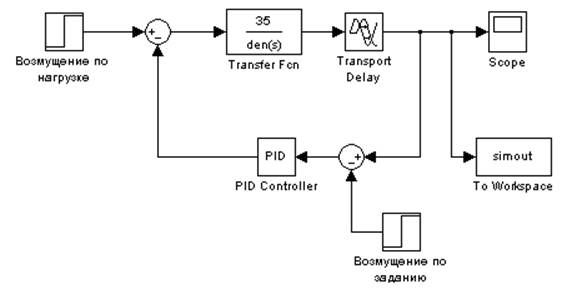
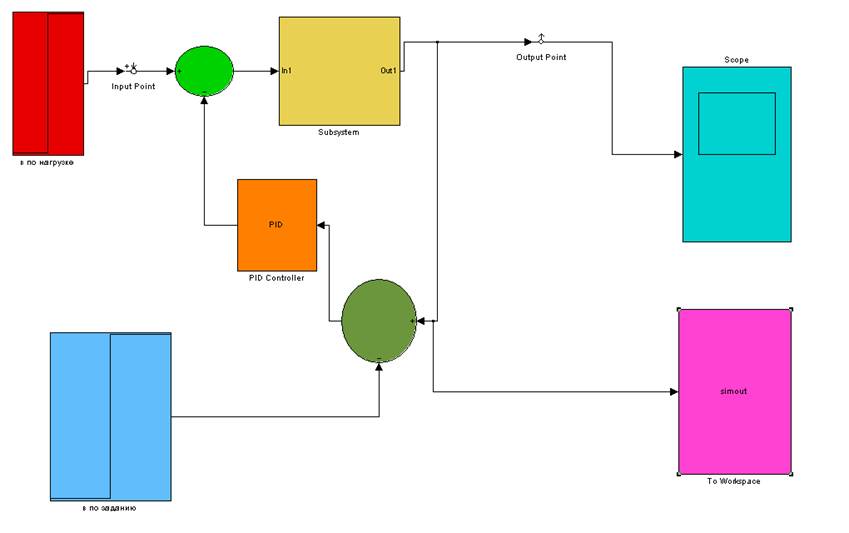
1) По данным таблицы в соответствии с номером варианта создадим модель СУ статическим объектом второго порядка.
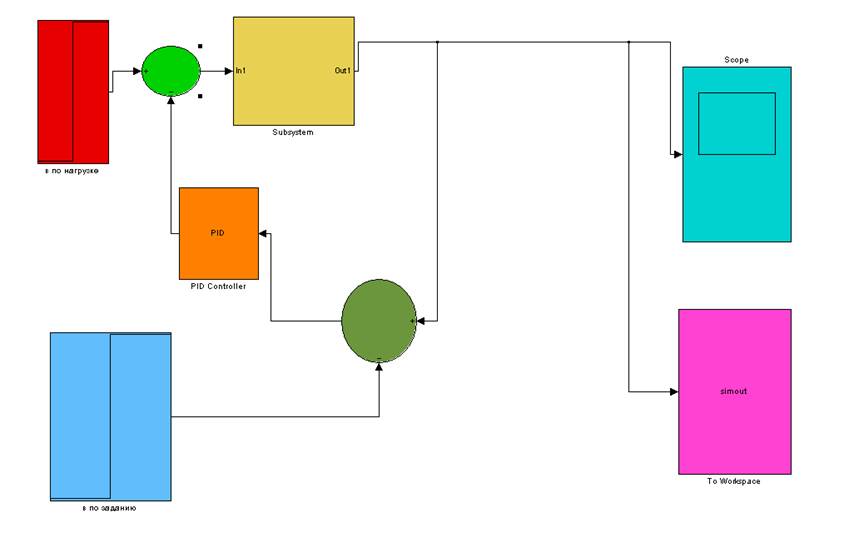
2) Создадим подсистему для модели объекта регулирования и изменим ее цвет.
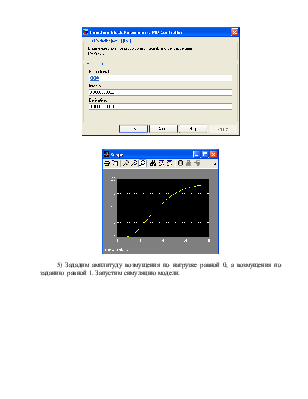
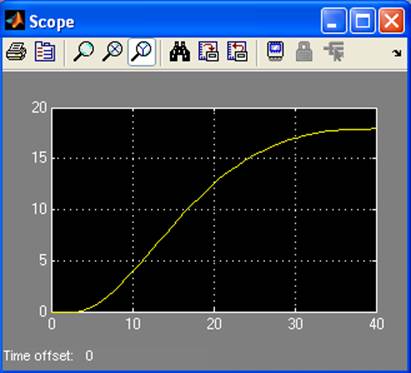
3) Зададим амплитуду возмущения по нагрузке равной 1, а возмущения по заданию равной 0. Запустим симуляцию модели.
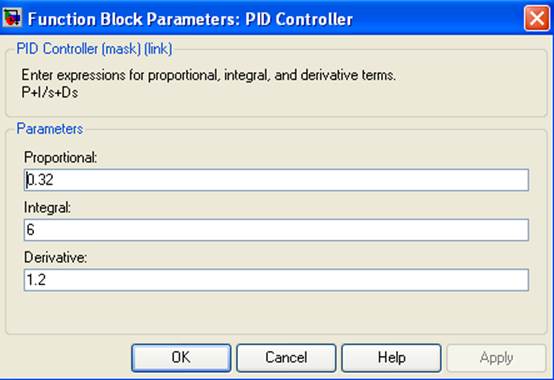
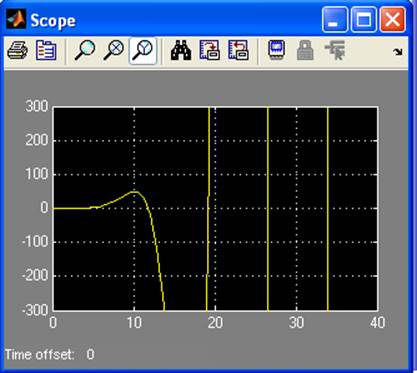
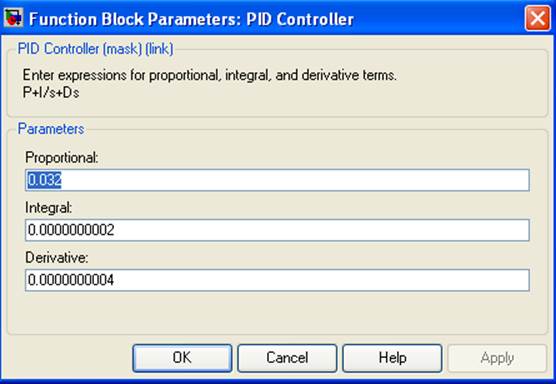
4) Изменяя параметры настройки ПИД-регулятора, добьемся на экране Scope приемлемого качества регулирования при возмущении по нагрузке.
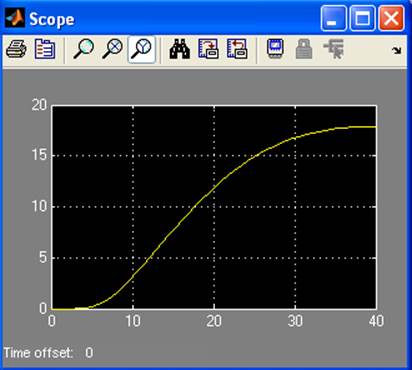
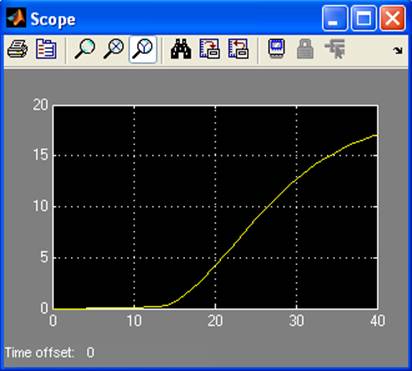
5) Зададим амплитуду возмущения по нагрузке равной 0, а возмущения по заданию равной 1. Запустим симуляцию модели.
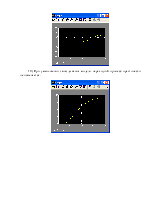
6) Изменяя параметры настройки ПИД-регулятора, добьемся на экране Scope приемлемого качества регулирования при возмущении по заданию.
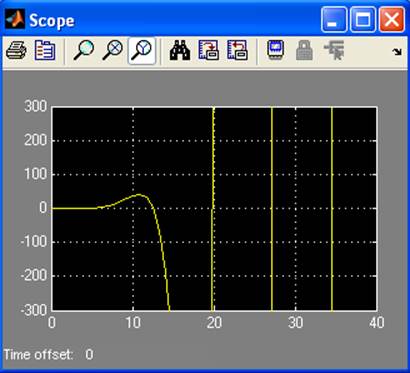
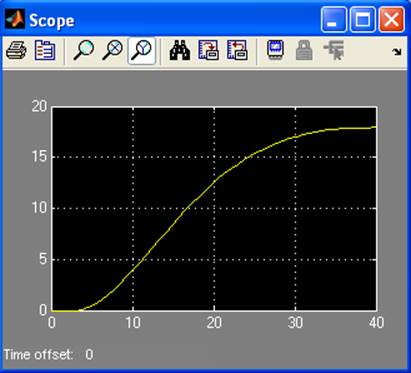
7) При увеличении ступенчатого воздействия увеличивается время запаздывания переходного процесса.
8) При уменьшении ступенчатого воздействия время запаздывания переходного процесса уменьшается.
9) При увеличении запаздывания модели переходной процесс становится неустойчивым.
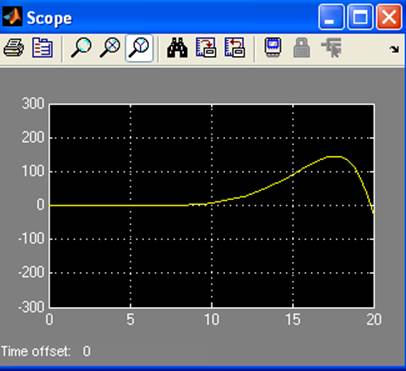
10) При уменьшении запаздывания модели переходной процесс практически не изменяется.
11) Подключим к входу и выходу модели LTI Viewer. В результате должна получиться следующая модель СУ.
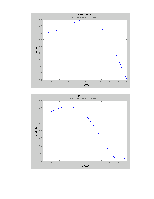
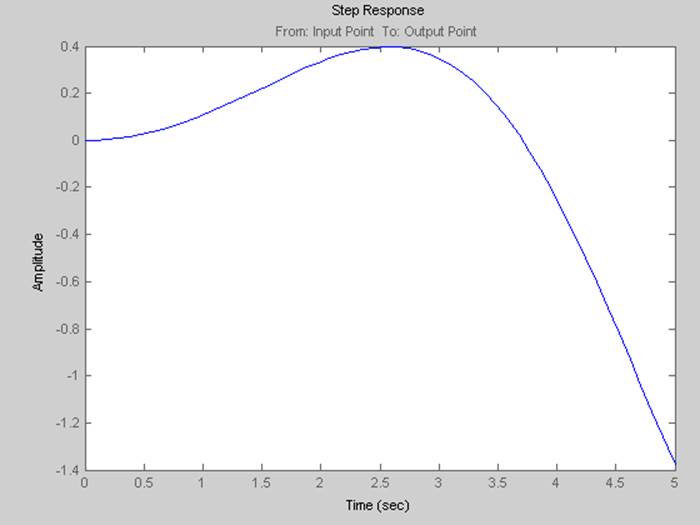
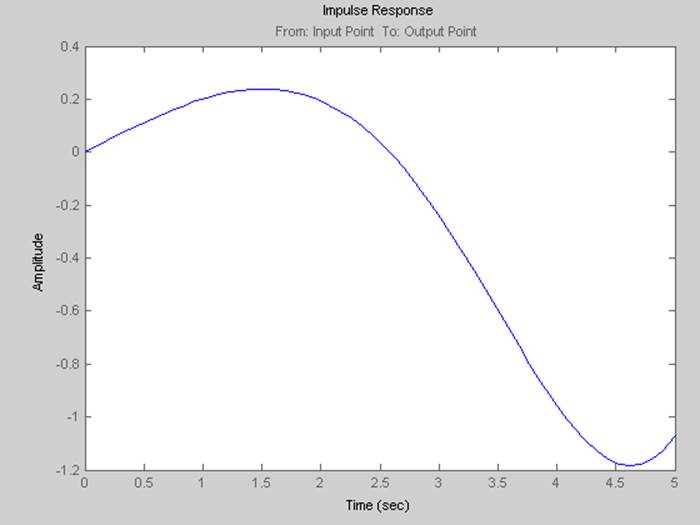
12) В меню Simulink окна LTI Viewer выберем пункт Get Linearized Model. Построим отклики системы во временной области, выбрав типы графиков Step и Impulse.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.