Система позволяет производить анализ, расчет и имитационное моделирование следующих видов САР:
· простой одноконтурной САР с П, ПИ и ПИД- регуляторами;
· одноконтурной САР с предиктором-упредителем Смита;
· комбинированной САР с компенсацией измеряемого возмущения;
· САР с использованием опережающего импульса с дифференциатором или с упредителем;
· обычной каскадной САР, реализуемой в двух различных модификациях <с независимым заданием каналов объекта и с промежуточным импульсом);
· каскадной САР с односторонней автономностью.
7. Основные потребительские Функции системы
7.1. Для каждой из перечисленных типовых схем регулирования система позволяет:
· оперативно вычислять значения параметров настройки регуляторов и корректирующих устройств, обеспечивающие требуемое качество переходных процессов в САР в интерактивном режиме или в режиме "экспресс настройки". Параметры настройки САР предоставляются пользователю в виде рекомендуемых значений коэффициентов типовых законов регулирования и канонических форм операторов корректирующих устройств, а также могут представляться в терминах конкретных технических средств, выбранных пользователем для реализации САР;
· проводить имитационное моделирование поведения САР при выбранных воздействиях и получать прямые оценки качества переходных процессов;
· проверять синтезированную или настроенную САР на грубость, чувствительность по отношению к изменениям или неточностям задания динамики объекта регулирования, а также к неточностям реализации с помощью промышленной регулирующей аппаратуры требуемых динамических характеристик регулятора и корректирующих устройств;
· проводить параметрическую оптимизацию системы по выбранному критерию качества переходного процесса для достижения управления, близкого к оптимальному при заданной структуре САР;
· оформлять результаты расчетов и моделирования в удобном для пользователя виде (графики переходных процессов, возможность сопоставления разных вариантов САР, протокол работы с системой и т.д..)
7.2. Кроме того, с помощью системы по задаваемым экспериментальным данным или по передаточным Функциям высокого порядка можно получать упрощенные типовые динамические модели объекта, достаточно просто реализуемые средствами вычислительной техники в АСУ ТП.
Упрощенные модели, являющиеся промежуточными результатами с точки перечисленных выше задач, могут представлять собой и самостоятельную ценность для пользователя, т.к. могут быть использованы в качестве элементов алгоритмов реализации таких Функций АСУ ТП, как контроль не- измеряемых переменных, диагностика неисправностей основного оборудования и каналов информации, оптимизация режимов производства и т.д.
Промоделируем переходной процесс САР и получим графики переходных процессов САР. Сделаем проверку САР на грубость и оптимизируем параметры регулятора методом поиска. По полученым данным сделаем вывод о том, как изменение коэффициента усиления и постоянной времени влияют на качество и устойчивость процесса.
Теоретические сведения, необходимые для выполнения работы
Обычная каскадная САР осуществляет стабилизацию основной (инерционной) регулируемой переменной Y1 с помощью главного регулятора, воздействующего на задание корректирующему регулятору вспомогательной (менее инерционной) переменной Y2. При этом динамические свойства объекта по обоим каналам могут задаваться либо независимо друг от друга, либо в виде импульса из промежуточной точки, аналогично САР с опережающим импульсом.
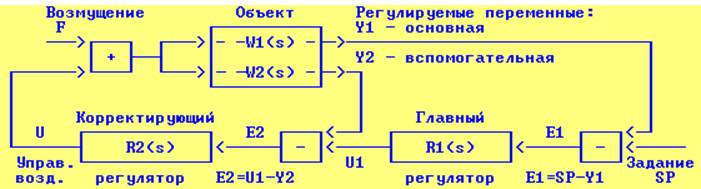
Рисунок 1 – Схема обычной каскадной САР
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.