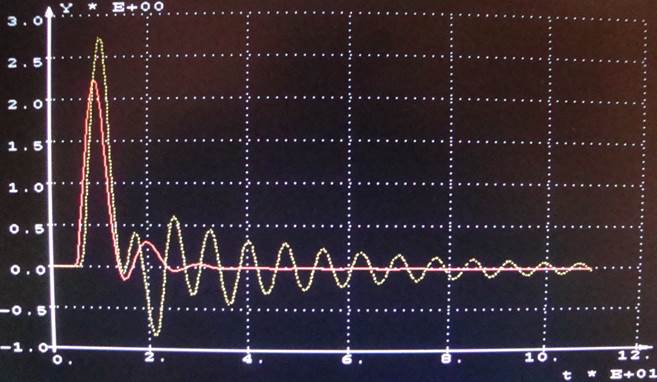
Выполним проверку схемы САР с дифференциатором на грубость при оптимальных параметрах (рисунок 24).

Сплошная – САР с исходным объектом; пунктир – САР с объектом,
у которого коэффициент усиления и запаздывания увеличены на 20%.
Рисунок 24 – Проверка САР на грубость при оптимальных параметрах
Максимальная динамическая ошибка = 2,09059.
Степень затухания = 0,0925923.
При увеличении коэффициента усиления и запаздывания на 20% переходной процесс становится расходящимся, то есть система при таких параметрах не работоспособна.
3.2.2 Настройка САР с опережающим импульсом. Схема с предиктором.
Кривая разгона инерционного участка представлена на рисунке 25.
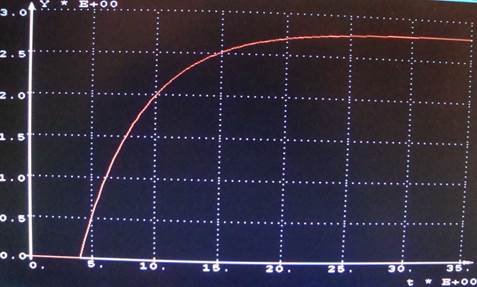
Рисунок 25 – Кривая разгона инерционного участка
Параметры предиктора первого порядка: Кп=2,8; τп=4,108; Тп=4,8.
Параметры ПИ-регулятора: Кр = 0,148; Ти = 3,466.
Построим переходной процесс (рисунок 26). Вид воздействия – единичный скачок.
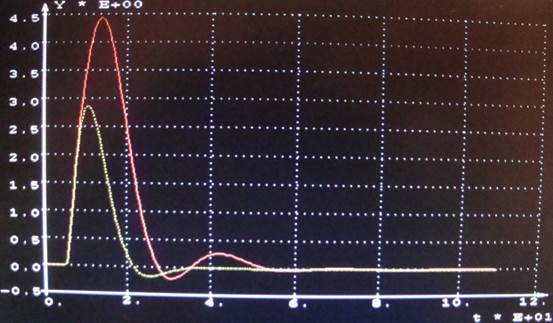
Сплошная – выход одноконтурной САР;
пунктир – выход САР с опережающим импульсом.
Рисунок 26 – Переходной процесс
Максимальная динамическая ошибка = 2,87792.
Степень затухания = 0,996272.
Время регулирования = 20,02.
Переходной процесс САР с опережающим импульсом имеет динамическую ошибку на 36% меньше чем одноконтурная САР.
Выполним проверку САР на грубость (рисунок 27).
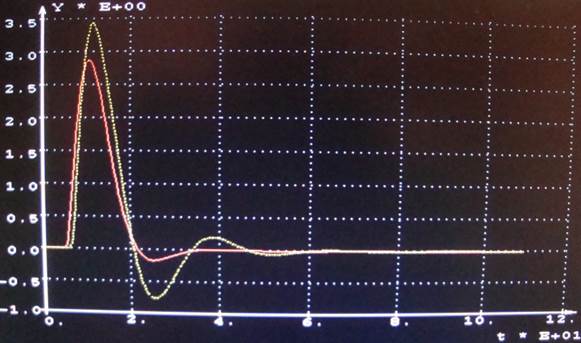
Сплошная – САР с исходным объектом; пунктир – САР с объектом, у которого коэффициент усиления и запаздывания увеличены на 20%
Рисунок 27 – Проверка САР на грубость
Максимальная динамическая ошибка = 3,4344.
Степень затухания = 0,941679.
Время регулирования = 30,888.
При увеличении параметров на 20% качество работы САР ухудшается, т.к. динамическая ошибка возрастает на 16%, а время регулирования увеличивается на 10,868 с.
Проведем оптимизацию параметров регулятора методом поиска.
Оптимальные параметры:
Критерий Кр Ти
144,03 0,40775 4,8356
Построим переходной процесс САР с предиктором при оптимальных параметрах (рисунок 28).
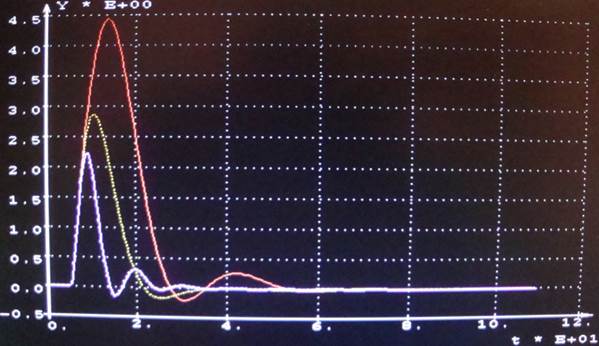
Сплошная – выход одноконтурной САР; пунктир – выход САР с опережающим импульсом; сплошная(низ) – выход САР с опережающим импульсом
при оптимальным параметрах
Рисунок 28 – Переходной процесс САР
Максимальная динамическая ошибка =2,21218.
Степень затухания = 0,862581
Время регулирования = 21,164.
В САР с оптимальными параметрами переходной процесс длится на 1,144 с дольше, но динамическая ошибка меньше на 23,2%.
Выполним проверку схемы САР с предиктором на грубость при оптимальных параметрах (рисунок 29).
Сплошная – САР с исходным объектом; пунктир – САР с объектом,
у которого коэффициент усиления и запаздывания увеличены на 20%.
Рисунок 29 – Проверка САР на грубость при оптимальных параметрах
Максимальная динамическая ошибка =2,73322.
Степень затухания = 0,848084.
Время регулирования = 37,752.
При увеличении параметров на 20% переходной процесс становится колебательным, плохозатухающим. Динамическая ошибка увеличивается на 19%, что говорит об ухудшении качества процесса регулирования.
Вывод: в процессе выполнения лабораторной работы я ознакомилась с назначением и областью применения программы IPC-CAD. А также изучила каскадную САР с односторонней автономностью и каскадную САР с опережающим импульсом. С помощью программы были получены оптимальные настройки регуляторов САР, в результате чего получены более качественные переходные процессы.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.