































применима при переработке сортированной руды, не имеющей больших колебаний физико-механических свойств.
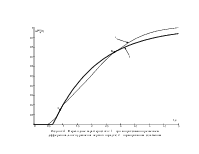
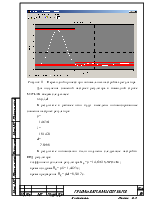
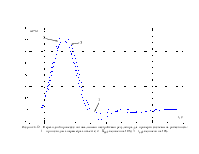
Рисунок 2.4 – Зависимость мощности P и заполненности пасти дробилки H от производительности по исходному питанию q при различной крупности исходного питания
Стабилизация мощности привода. Поскольку поступление легкодробимой руды позволяет увеличивать подачу руды, не опасаясь перегрузки привода, а поступление труднодробимой руды требует снижения производительности питателя, предлагается стабилизировать нагрузку привода воздействием на величину исходного питания. Для анализа возможностей схем, основанных на данном принципе, обратимся к рисунку 2.4.
Пусть, ориентируясь на труднодробимую руду, дано задание стабилизирующей системе, обеспечивающее работу в точках B1 и B2. Поступление более мелкой руды в этом случае приведёт к переполнению дробилки (точки D1 и D2). В связи с этим задание системе необходимо давать, исходя из условий дробления легкодробимой руды (точки A1 и A2). Однако в этом случае при дроблении труднодробимой руды не будут использоваться технические возможности дробилки. Но всё же при стабилизации нагрузки оборудование обычно лучше используется, чем при стабилизации производительности.
В схему АСР стабилизации нагрузки привода должен входить датчик мощности. В процессе работы дробилки её мощность даже при постоянных физико-механических свойствах руды изменяется около какого-то среднего значения. Особенно резко это колебание проявляется у привода щековых дробилок. Поэтому сигнал датчика мощности привода предварительно пропускается через сглаживающий фильтр. Но любой фильтр является инерционным звеном, и чем полнее фильтрование помех, тем инерционнее получается АСР. А инерционность АСР ведёт к снижению её устойчивости. В результате может оказаться, что требования обеспечения устойчивости системы фильтрацией помех сигнала датчика нагрузки будет противоречить требованиям устойчивости системы.
Такие условия обычно возникают при попытках реализации рассматриваемого принципа на щековых дробилках. Отфильтрованный сигнал изменяется медленнее, чем условия дробления руды. И не успеет регулятор отреагировать на медленно изменяющийся сигнал датчика, как скачкообразное изменение физико-механических свойств дробимой руды вызовет переполнение (или перегрузку) дробилки.
В качестве датчиков нагрузки можно использовать датчики тока, потребляемого электроприводом, если колебания напряжения сети невелики.
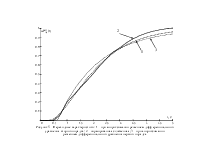
Стабилизация заполненности пасти дробилки. Оптимальным решением проблемы загрузки дробилки была бы стабилизация заполненности пасти дробилки с использованием гамма-электронных реле уровня. Достоинства такого способа – максимальная простота решения и высокое быстродействие при простой отстройке от помех в рабочем сигнале. Анализ рисунка 2.4 показывает, что производительность при дроблении легкодробимой руды равна производительности, достигаемой при стабилизации нагрузки привода, и больше производительности, достигаемой при стабилизации питания и производительность при дроблении
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.