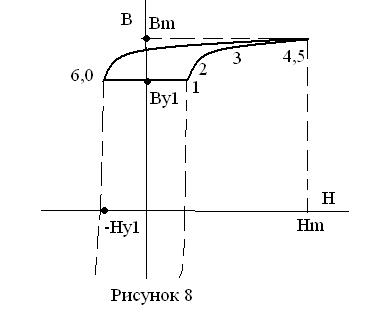
Если изменить величину управляющего тока, изменится и начальное положение рабочей точки (положение перед положительной полуволной входного напряжения). Например, при начальном положении (-Hy1; -By1) траектория будет иметь вид, показанный на рисунке 8.
Во временной области устройство по рисунку 5 представляет собой управляемую задержку, причем, управляющим сигналом служит постоянный ток iy, а время задержки
![]()
Изменяя управляющий ток, можно изменять время задержки положительного фронта напряжения на нагрузке и тем самым долю периода, в течение которой энергия из источника входного напряжения передается в нагрузку. Следовательно, средняя за период мощность в нагрузке также будет изменяться при изменении управляющего тока.
Вышеприведенное соотношение можно переписать в виде
UBXm*![]() t=wS
t=wS![]() B,
B,
где ![]() B=Bm - By, причем,
размерности правой и левой частей этого уравнения В*с (вольт-секунда), иначе
говоря, состояние магнитопровода дросселя зависит от интеграла по времени
приложенного к его обмотке напряжения, то есть, площади между кривой напряжения
и осью времени на временной диаграмме. В общем случае, когда форма напряжения
непрямоугольная,
B=Bm - By, причем,
размерности правой и левой частей этого уравнения В*с (вольт-секунда), иначе
говоря, состояние магнитопровода дросселя зависит от интеграла по времени
приложенного к его обмотке напряжения, то есть, площади между кривой напряжения
и осью времени на временной диаграмме. В общем случае, когда форма напряжения
непрямоугольная,
 .
.
В источниках вторичного электропитания может быть использована схема стабилизированного преобразователя напряжения по рисунку 9. Преобразователь содержит инвертор V1, трансформатор Т1, двухполупериодный управляемый выпрямитель на нелинейных дросселях L1 и L2, фильтр выпрямленного напряжения на линейном дросселе L3 и конденсаторе С1, источник опорного напряжения на стабилитроне D6 и усилитель ошибки на операционном усилителе AR1. Диоды D3 и D4 – основные силовые, D5 – также силовой диод, служащий для замыкания тока дросселя фильтра, диоды D1 и D2 – отсекающие в цепях управления нелинейными дросселями, резистор R5 – нагрузка.
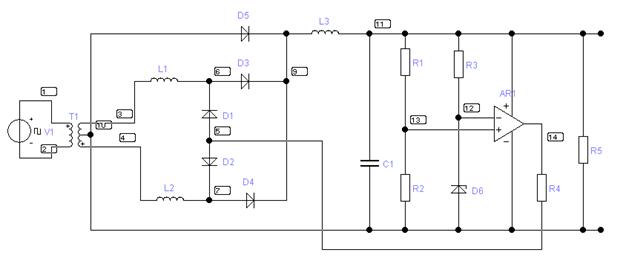
Рисунок 9
В процессе
работы положительные полуволны переменного напряжения прямоугольной формы
поочередно прикладываются к каждой из цепей L1 – D3 – фильтр – нагрузка, или L2 – D4 – фильтр – нагрузка. Дроссель L1 (L2) в начале соответствующего полупериода становится
проводящим ток по истечении времени перемагничивания его магнитопровода ![]() t,
величина которого зависит от протекающего через резистор R4
тока подмагничивания, этот ток - от выходного напряжения операционного
усилителя, а оно, в свою очередь, - от разности между опорным напряжением на
стабилитроне D6 и частью выходного напряжения,
снимаемого с узла 13. Увеличение выходного напряжения стабилизатора приводит к
росту напряжения на выходе операционного усилителя и тока перемагничивания
нелинейных дросселей, а это вызывает во время нерабочей полуволны перемещение
рабочей точки магнитопроводов дросселей вниз и влево на рис. 6, в результате
задержка включения дросселя увеличивается и действующее напряжение на входе
фильтра уменьшается, уменьшается и выходное постоянное напряжение. При
уменьшении напряжения на нагрузке ниже заданного ток через R4
уменьшается, уменьшается задержка
t,
величина которого зависит от протекающего через резистор R4
тока подмагничивания, этот ток - от выходного напряжения операционного
усилителя, а оно, в свою очередь, - от разности между опорным напряжением на
стабилитроне D6 и частью выходного напряжения,
снимаемого с узла 13. Увеличение выходного напряжения стабилизатора приводит к
росту напряжения на выходе операционного усилителя и тока перемагничивания
нелинейных дросселей, а это вызывает во время нерабочей полуволны перемещение
рабочей точки магнитопроводов дросселей вниз и влево на рис. 6, в результате
задержка включения дросселя увеличивается и действующее напряжение на входе
фильтра уменьшается, уменьшается и выходное постоянное напряжение. При
уменьшении напряжения на нагрузке ниже заданного ток через R4
уменьшается, уменьшается задержка ![]() t, растет доля периода, в течение которой ток источника
напряжения поступает в фильтр. Так происходит стабилизация выходного
напряжения. В отличие от стабилизирующих преобразователей других типов, в схеме
по рис. 9, во-первых, нет мощных управляемых полупроводниковых приборов
(транзисторов или тиристоров), и во-вторых, регулирование осуществляется
исключительно на вторичной стороне трансформатора, то есть, со стороны нагрузки.
Передавать сигнал управления на первичную сторону, обеспечивая при этом для него
гальваническую развязку, как это происходит в стабилизирующих преобразователях
других типов, здесь не нужно, поэтому устройство получается проще и надежнее.
Кроме того, замедленное включение силовых диодов приводит к ограничению спектра
и мощности импульсных помех как во вторичной, так и в первичной цепях, тем
самым улучшается электромагнитная совместимость преобразователя с другими
электронными устройствами.
t, растет доля периода, в течение которой ток источника
напряжения поступает в фильтр. Так происходит стабилизация выходного
напряжения. В отличие от стабилизирующих преобразователей других типов, в схеме
по рис. 9, во-первых, нет мощных управляемых полупроводниковых приборов
(транзисторов или тиристоров), и во-вторых, регулирование осуществляется
исключительно на вторичной стороне трансформатора, то есть, со стороны нагрузки.
Передавать сигнал управления на первичную сторону, обеспечивая при этом для него
гальваническую развязку, как это происходит в стабилизирующих преобразователях
других типов, здесь не нужно, поэтому устройство получается проще и надежнее.
Кроме того, замедленное включение силовых диодов приводит к ограничению спектра
и мощности импульсных помех как во вторичной, так и в первичной цепях, тем
самым улучшается электромагнитная совместимость преобразователя с другими
электронными устройствами.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.