
















































Ключевые слова: МОДУЛЬ ОТОБРАЖЕНИЯ, КОНСТРУКЦИЯ, МЕТОД ИЗМЕРЕНИЯ, МИКРОСХЕМА, СТРУКТУРНАЯ СХЕМА, СХЕМА СБОРКИ, ТИПОВОЙ ТЕХНОЛОГИЧЕСКИЙ ПРОЦЕСС, ЭКОНОМИЧЕСКАЯ ЭФФЕКТИВНОСТЬ.
Условные сокращения
ВС- воздушное судно
БРЛС- бортовая радиолокационная станция
РЛС- радиолокационная станция
ПНК- пилотажно-навигационный комплекс
ЛА- летательный аппарат
МНР- метеонавигационные радиолокаторы
ГМО- гидрометеорологические образования
РЛО- радиолокационный ориентир
РМО- радиолокационные маяки- ответчики
ПУ- пульт управления
КУО- курсовой угол ориентира
СВС- система воздушных сигналов
ЛР- линия развертки
ЭЛТ- электронно-лучевая трубка
ОЦ- отметка цели
БРК- бортовой радиолокационный комплекс
ЭСППЗУ- электронно-стираемое программируемое постоянное запоминающее устройство
ЦПУ- центральный пульт управления
ПП- печатная плата
ЭРЭ- электрические радио элементы
КМО- компоненты монтируемые в отверстия
КМП- компоненты монтируемые на поверхность
СОДЕРЖАНИЕ
РЕФЕРАТ………………………………………………………………………….4
Условные сокращения…………………………………………………………….5
ВВЕДЕНИЕ………………………………………………………………………..8
1ОБЩИЕ СВЕДЕНИЯ О БОРТОВЫХ РАДИОЛОКАЦИОННЫХ СИСТЕМАХ И КОМПЛЕКСАХ…………………………………………………9
1.1 Назначение и размещение радиолокационного комплекса на борту самолета…………………………………………………………………………..11
2 АНАЛИЗ СУЩЕСТВУЮЩИХ МЕТОДОВ И КОМПЛЕКСНЫХ СИСТЕМ ДЛЯ ОЦЕНКИ РАДИОЛОКАЦИОННОЙ ОБСТАНОВКИ………………….18
2.1 Анализ существующих методов измерения дальности…………....18
2.2 Анализ существующих устройств измерения дальности типа РЛС “Буран”……………………………………………….…………………………..27
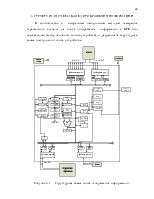
3 СТРУКТУРНАЯ СХЕМА БЛОКА ОТОБРАЖЕНИЯ ИНФОРМАЦИИ….30
3.1 Описание работы приемо-передатчика………………….………….31
4 ПРИНЦИПИАЛЬНАЯ СХЕМА МОДУЛЯ ОТОБРАЖЕНИЯ ИНФОРМАЦИИ…………………………..……………………………………..33
4.1 Выбор преобразователей и анализ элементной базы………..…….33
4.2 Выбор источника стабилизированного питания…………….…….40
5 ОПИСАНИЕ КОНСТРУКЦИИ…………….………………...………………………..41
5.1 Расчет на прочность…………………………..……………………..43
6 РАЗРАБОТКА ТЕХНОЛОГИЧЕСКОГО ПРОЦЕССА СБОРКИ МОДУЛЯ
6.1Анализ технологичности………….…..……………….…………….47
6.1.1 Качественная оценка технологичности……………..……….47
6.1.2 Количественная оценка технологичности……………….….52
6.2 Разработка технологической схемы сборки печатного узла….…..54
6.3 Разработка маршрутной технологии……………….………………55
7 ЭКОНОМИЧЕСКАЯ ЧАСТЬ……………………………...………………….56
7.1 Описание изделия…………..…………………………………………56
7.2 Оценка рынка сбыта………………………….……………………….56
7.3 Расчет себестоимости сбыта и цены программного продукта…..…59
8 ОХРАНА ТРУДА………………………..…………………………………….63
8.1 Вредные и опасные факторы, влияющие на оператора……………63
ЗАКЛЮЧЕНИЕ……………………………...…………………………………..73
БИБЛИОГРАФИЧЕСКИЙ СПИСОК…………………………………………..75
ПРИЛОЖЕНИЕ А (Электрическая принципиальная схема)…………………76
ПРИЛОЖЕНИЕ Б (Перечень элементов к электрической принципиальной схеме)………………………………………………………………………..……77
ПРИЛОЖЕНИЕ В(Конструкция прибора)……………...………...…………...79
ПРИЛОЖЕНИЕ Г(Спецификация)…………………..…………………...……80
ПРИЛОЖЕНИЕ Д (Сборочный чертеж печатной платы)………………….…81
ПРИЛОЖЕНИЕ Е (Перечень элементов к печатной плате)…………….……82
ПРИЛОЖЕНИЕ Ж (Единичный технический процесс)……………………....84
ПРИЛОЖЕНИЕ И (Схема сборки)……………………………………….…….91
ПРИЛОЖЕНИЕ К (Маршрутные карты)………………………………………92
ВВЕДЕНИЕ
Одним из эффективных средств самолетовождения и обеспечения безопасности полетов является бортовая радиолокационная станция. Она устанавливается на всех магистральных ВС и представляет собой приемно-передающие устройства, обеспечивающее появление на экране индикатора условной картины местности, а так же обнаружение ВС и очагов гроз.
Принцип действия БРЛС основан на способности электромагнитных волн высоких частот отражаться от объекта, находящихся на пути их распространения, с различной интенсивностью и направленностью. Благодаря автономности станция может применятся в полетах любой дальности, обеспечивая при этом постоянную точность измерения навигационных элементов.
Бортовые РЛС позволяют решать следующие задачи: вести ориентировку и определять место ВС по опознанным радиолокационным ориентирам (РЛО); определять угол сноса и путевую скорость; обнаруживать грозовые очаги и обходить их в безопасном направлении; предупреждать опасные сближения с другими ВС. Кроме того, при связи с ПНК РЛС позволяет корректировать счисленные координаты места ВС.
Радиолокационное изображение местности на экране индикатора имеют некоторые сходства с визуальным видом пролетаемой местности. Следует отметить, что радиолокационное изображение местности зависит от характера отражения радиоволн объектами земной поверхности. Каждый объект отражает радиоволны по-разному. Поэтому принятые приемником отраженные сигналы дают на экране отметки различной яркости, по которой можно определить характер объекта. Для наблюдения объекта на экране необходимо, что бы яркость его отметки отличалась от яркости фона, т.е. требуется достаточный яркостный контраст между ними.
1ОБЩИЕ СВЕДЕНИЯ О БОРТОВЫХ РАДИОЛОКАЦИОННЫХ СИСТЕМАХ И КОМПЛЕКСАХ
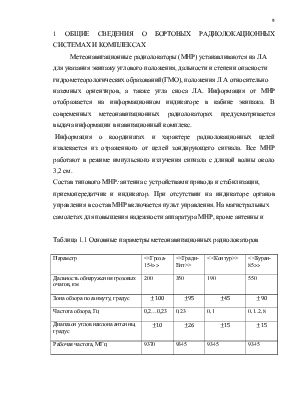
Метеонавигационные радиолокаторы (МНР) устанавливаются на ЛА
для указания экипажу углового положения, дальности и степени опасности
гидрометеорологических образований(ГМО), положения Л А относительно
наземных ориентиров, а также угла сноса ЛА. Информация от МНР отображается на информационном индикаторе в кабине экипажа. В современных метеонавигационных радиолокаторах предусматривается выдача информации в навигационный комплекс.
Информация о координатах и характере радиолокационных целей извлекается из отраженного от целей зондирующего сигнала. Все МНР работают в режиме импульсного излучения сигнала с длиной волны около 3,2 см.
Состав типового МНР:антенна сустройствами привода и стабилизации,
приемопередатчик и индикатор. При отсутствии на индикаторе органов управления в состав МНР включается пульт управления. На магистральных
самолетах для повышения надежности аппаратура МНР, кроме антенны и
Таблица 1.1 Основные параметры метеонавигационных радиолокаторов
|
Параметр |
<<Гроза- 154>> |
<<Гради- Ент>> |
<<Контур>> |
<<Буран- 85>> |
|
Дальность обнаружения грозовых очагов, км |
200 |
350 |
190 |
550 |
|
Зона обзора по азимуту, градус |
|
|
|
|
|
Частота обзора, Гц |
0,2…0,23 |
0,23 |
0,1 |
0,1..2,8 |
|
Диапазон углов наклона антенны, градус |
|
|
|
|
|
Рабочая частота, МГц |
9370 |
9345 |
9345 |
9345 |
|
Параметр |
<<Гроза- 154>> |
<<Гради- Ент>> |
<<Контур>> |
<<Буран- 85>> |
|
Импульсная мощность, кВт |
9 |
22 |
4 |
10 |
|
Длительность импульса, мкс |
3,5 |
2,0; 5,0 |
2,0 |
0,7; 1,5; 3,0 |
|
Частота повторения импульсов, Гц |
400 |
200 |
100 |
200; 400 |
|
Чувствительность приемника, дБ≪мВт |
100 |
106 |
105 |
100 |
|
Ширина ДН в горизонтальной плоско- сти, градус |
3 |
3,3 |
6,5 |
2 |
|
Встроенный контроль |
Нет |
Есть |
Есть |
Есть |
|
Потребляемая мощность от сети: |
||||
|
200 В, 400 Гц (три фазы), В-А |
390 |
600 |
34,5 |
500 |
|
27 В постоянного тока, Вт |
80 |
135 |
120 |
190 |
|
Масса, кг: всего комплекта (без кабелей) |
||||
|
30,5 |
34,5 |
14 |
45 |
|
|
приемопередатчика |
10,5 |
13 |
8 |
21 |
|
Объем, дм3: |
||||
|
приемопередатчика |
16 |
16,4 |
10,2 |
Нет свед. |
|
индикатора |
12,1 |
8,25 |
5,9 |
То же |
Продолжение таблицы 1.1
связанных в ней устройств привода и стабилизации, дублируется. Варианты
МНР часто обозначают индексом, соответствующим типу ЛА, для которого
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.