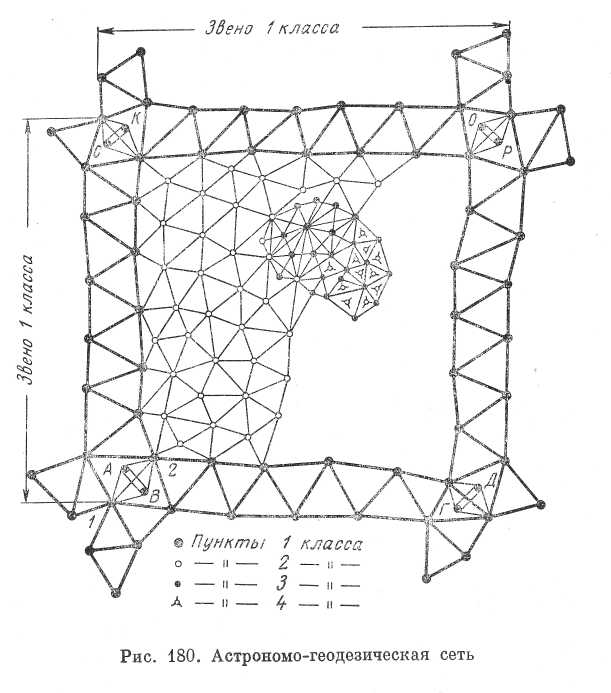
На основі геодезичних мереж 1 і 2 класів розвиваються геодезичні мережі 3 і 4 класів. Довжина сторони тріангуляції 3 класи повинна бути не більше 5-8 км, а тріангуляція 4 класи від 2 до 5 км Припустимі нев'язки в сумі кутів трикутників у триангуляції 3 класи не повинні перевищувати 5", а в триангуляції 4 класи 7".
Завершенням робіт зі створення опорної геодезичної мережі — триангуляції, трилатерації, полігонометрії — і нівелюванню всіх класів є складання каталогів, з яких і одержують координати пунктів геодезичної мережі. У каталогах крім назв пунктів, номерів точок, видів і класу геодезичних знаків по їхньому місцезнаходженню вказують для триангуляції: координати X, У и Н кожного пункту мережі із вказівкою системи координат, а також дирекційні кути сторін мережі і їхніх довжин. Для полігонометрії: координати X, У и Н пунктів, дирекційні кути й довжини всіх сторін полігонометрії. Висоти всіх пунктів даються від рівня Кронштадтського футштока.
|
|
3. Попереднє обчислення
У відкритій місцевості, для визначення координат розпознаків, користуються методом триангуляції. Він полягає в тому, що на сторонах трикутників державної геодезичної мережі, як на, базисах, будують системи трикутників в яких як правило, міряють всі три кути.
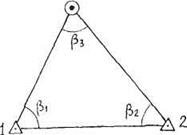
Якщо на місцевості побудувати трикутник, у якого одною вершиною є розпознак "Р" двома другими пунктами триангуляції (полігонометрії) (Рис. 4), і виміряти теодолітом всі кути β1, β2, β3, які повинні бути не менше 300 і не більше 1200, то координати розпознака можна обчислити в такій послідовності:
1. Обчислюють кутову нев'язку в трикутнику (β1+β2+β3) - 1800 = fβ, яка не повинна перевищувати ± 1', якщо кути вимірювались оптичним теодолітом і ±1,5', якщо кути вимірювались 30" теодолітом і виправляють виміряні кути.
2. За координатами пунктів "1" "2", розв'язуючи обернену геодезичну задачу, визначають дирекційний кут α1-2 лінії 1-2 і її довжину d1-2.
3. За теоремою синусів обчислюють сторони трикутника 1-Р і 2-Р.
4. Обчислюють дирекційні кути сторін трикутника 1-Р і 2-Р
α2-Р = α1-2 - β1; α2-Р = α1-2 ± 1800 + β2.
5. По обчислених сторонах і дирекційних кутах сторін трикутника двічі обчислюють координати розпознака.
Якщо розпізнавальний знак "Р" видно тільки з двох пунктів тріангуляції "1" і "2" (Рис. 5) при цьому, кути на пунктах триангуляції "1" або "2" менші 30°, то користуються допоміжною точкою "С", яку видно із цих пунктів, крім цього з точки "С" повинно бути видно пункти тріангуляції "1" і "2" і розпознак "Р". В такому випадку на всіх точках міряють теодолітом всі кути. Після вимірювання кутів, у кожному трикутнику, обчислюють кутові нев'язки і якщо вони не перевищують допустиму величину виправляють виміряні кути. За координатами вихідних пунктів "1" і 2" і виправлених кутах за формулами Юнга, обчислюють координати допоміжної точки "С", а потім двічі з трикутників 2СР і СІР обчислюють координати розпознака "Р".
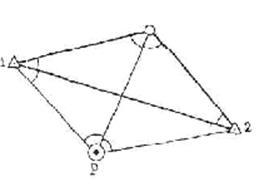 |
Рис. 5
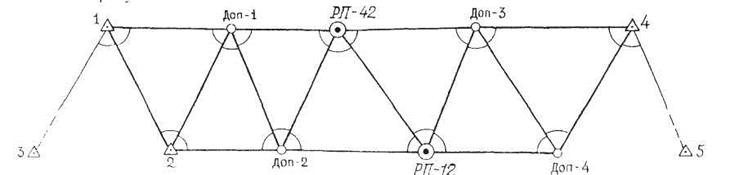
В відкритій і напіввідкритій місцевості координати розпознаків можна визначити ланцюгом трикутників.
Для цього необхідно мати на початку ланцюга не менше двох пунктів триангуляції і в кінці ланцюга хоч один, або навпаки (Рис.6). Ланцюгом трикутників можна визначати одночасно координати декількох розпознаків. Так, як між пунктами триангуляції і розпозпаками немає взаємної видимості то зв'язок між ними виконується за допомогою допоміжних точок. На всіх точках ланцюга трикутників теодолітом міряють всі кути і після цього визначають кутові нев'язки в трикутниках. Допустимі кутові нев'язки розподіляють порівну на всі кути трикутника і за формулою Юнга, починаючи від вихідної сторони триангуляції. послідовно від трикутника до трикутника обчислюють координати всіх точок.
Обчисленні координати (окремо абсциси і ординати) виправляють в такий спосіб:
1. Утворюють різницю "Vn" між двома значеннями координати кінцевого пункту триангуляції обчисленого в даному ланцюгу трикутників, і його значенням взятого з каталога координат пунктів триангуляції.
2. Змінюють знак одержаної помилки "Vn" па протилежний, ділять її величину на кількість трикутників в ланцюгу "п" і цей результат множать на кількість трикутників "і" між вихідними пунктами триангуляції і розпознаком, положення якого необхідно виправити.
|
|
Величина нев'язки в координатах "Vn" кінцевого пункту триангуляції не повинна перевищувати 4 м при зйомці в масштабі 1:10000 і 2 м - при зйомці в масштабі 1:5000.
Рис. 6
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.