|
|
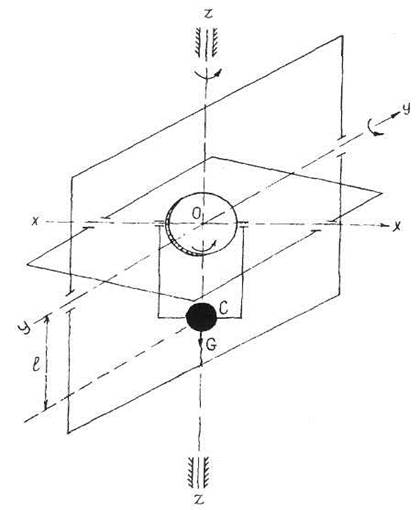
Рис. 3
Таким чином, головна вісь маятникового гіроскопа буде старатись найкоротшим шляхом повернутись в напрямі осі світу, тобто повернутись за азимутом в площину меридіана і нахилитись на кут иφ", який дорівнює широті місця спостереження. Все це буде проходити в усіх точках окрім полюсів, тому що на полюсах напрям сили тяжіння не буде змінюватись і вимушена прецесія не виникає.
|
|
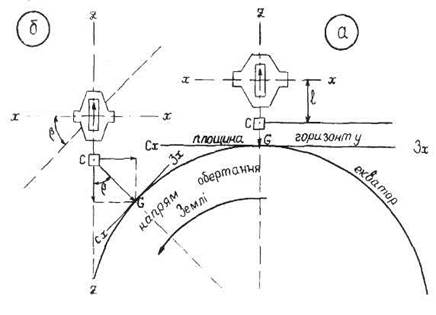
Розглянемо ще один окремий випадок, коли маятниковий гіроскоп установлено на екваторі (всі міркування слушні для будь-якої широти), а головна вісь гіроскопа займає строго горизонтальне положення, коли ротор не обертається. Нехай в деякий початковий момент головна вісь XX розташована в горизонтальному положенні і направлена з заходу на схід (Рис.4,а). В цей момент точка підвісу лежить на напрямі дії сили ваги "G" тому навколо осі чутливості YY обертаючий момент дорівнює нулю і головна вісь згідно першої властивості свобідного гіроскопа зберігає початкове положення. В наступний момент часу внаслідок обертання Землі сила "G" змінить свій напрям (Рис.4,б) в той час, як вісь гіроскопа свій напрям збереже і утворить з площиною горизонту деякий кут β. В результаті до головної осі через її підшипники буде прикладена пара сил, яка заставить цю вісь прецесувати в напрямі меридіана.
Рис. 4
В кінцевому результаті головна вісь займе напрям паралельний осі світу, тобто установиться в меридіані горизонтально і після цього маятниковий момент уже не буде виникати. Але, коли кут нахилу головної осі до горизонту у вільному положенні не дорівнює широті точки спостереження, то ця вісь не зможе залишатися нерухомою, тому що маятниковий момент не дозволить їй нахилитись в меридіані на кут "φ" і зайняти паралельний до осі світу напрям. Внаслідок цього головна вісь ідеального маятникового гіроскопа буде виконувати гармонійні незгасаючі коливання симетричні відносно площини дійсного (географічного) меридіана.
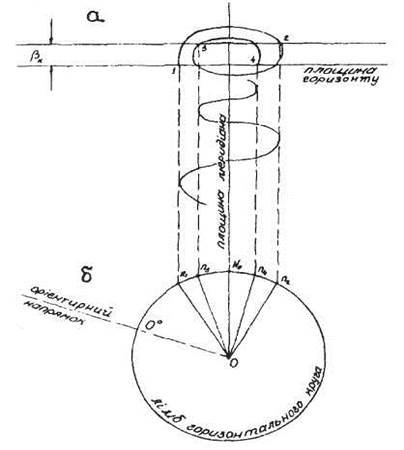
Якщо спроектувати на площину першого вертикала траєкторію, яку описує кінець головної осі маятникового гіроскопа, то ми одержимо витягнутий еліпс з малою віссю поблизу меридіана (Рис.5,а). Крайні точки траєкторії 1, 2, 3, 4 розташовані на великій осі еліпса називаються точками реверсії. Якщо спроектувати точки реверсії на кутомірний круг, розташований горизонтально, центр якого збігається з віссю ZZгіроскопа, ми одержимо відліки n1 n2, n3, n4 для ідеального гіроскопа можна одержати напрям дійсного меридіана N0 (Рис.5,б). В реальному гіроскопі внаслідок тертя в системі підвісу, коливання головної осі будуть слабо згасати, тому точки реверсії розташуються не ідеально симетрично відносно меридіана. Знаючи Nо, легко визначити дійсний азимут А напряму на місцевий предмет.
|
|
А = М - Nо, де М – відлік по горизонтальному кругу при візуванні труби гіротеодоліта на місцевий предмет. Гіротеодолітом можна визначати азимут до географічної широти 75°.
Рис. 5
3. Будова гіротеодоліта ГІ-Б2
Гіротеодолітом (гірокомпасом) називається прилад, який об'єднує гіроскоп, який є датчиком напряму дійсного меридіана і кутомірну частину яким можна визначити напрям дійсного меридіана і прив'язки до нього напрямів на місцеві предмети. В комплект гіротеодоліта входить гіроблок кутомірна частина, блок живлення і джерело енергії. Крім цього в комплект гіротеодоліта входять: штатив, сполучні кабелі і різні допоміжні прилади, які полегшують підготовку гіротеодоліта для спостережень.
На Рис.6 зображено гіротеодоліт Г1-Б2, конструкція якого характерна для гіротеодолітів, які мають торсіонний підвіс чутливого елемента і так звану ручну спостережувальну систему. Назви основних гвинтів та вузлів гіротеодоліта ГІ-Б2:
1. Алідада; 2. Навідний гвинт горизонтального круга; 5. Підіймальний гвинт; 14.
Корпус гіроблока; 15. Колесо установки нуль пункту; 18. Додатковий відліковий мікроскоп; 20. Гальмівний важіль; 24. Маховик ручного аретира; 27. Маховик додаткового аретира; 29. Сполучник для підключення кабелю; 30. Основна плита; 37. автоколіматор для спостереження точок реверсії; 38. Гвинт кріплення гіроблока; 39. Кнопка включення швидкого руху; 40. Гвинт регулювання ходу ніжок штатива; 41. Віконце для заміни лампи розжарення автоматичної спостережувальної системи; 42. Кільце для фокусування чіткості зображення; 43. Закріпний гвинт горизонтального круга; 44. Гвинт кріплення основної плити; 45. Потенціометр системи автоматичного слідкування; 46. Кришка освітлювача кругів; 47. Освітлювач автоколіматора; 48. Гвинт оптичного мікрометра; 49. Окуляр відлікового мікроскопа; 50. Ручка для переключення відлікових систем; 51. Виправний гвинт рівня при вертикальному крузі; 52. Закріпний і навідний гвинти вертикального круга; 53. Виправний гвинт рівня на алідаді горизонтального круга.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.