

Лабораторная работа №2.Исследование портов ввода/вывода в режиме ввода
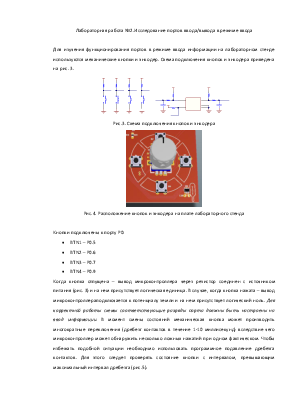
Для изучения функционирования портов в режиме ввода информации на лабораторном стенде используются механические кнопки и энкодер. Схема подключения кнопок и энкодера приведена на рис. 3.
Рис.3. Схема подключения кнопок и энкодера
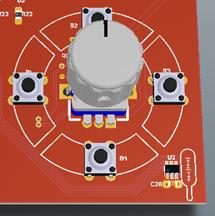
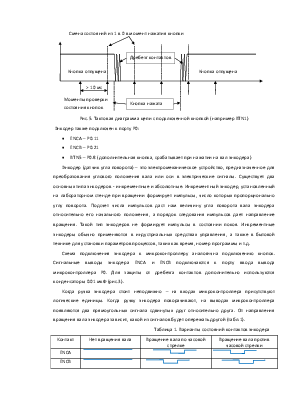
Рис.4. Расположение кнопок и энкодера на плате лабораторного стенда
Кнопки подключены к порту P0:
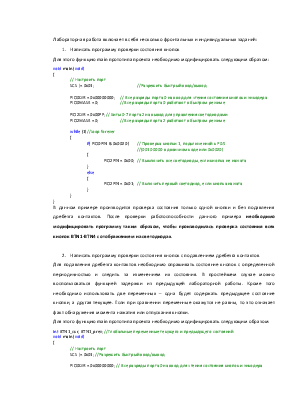
Когда кнопка отпущена – вывод микроконтроллера через резистор соединен с источником питания (рис. 3) и на нем присутствует логическая единица. В случае, когда кнопка нажата – вывод микроконтроллераподключается к потенциалу земли и на нем присутствует логический ноль. Для корректной работы схемы соответствующие разряды порта должны быть настроены на ввод информации. В момент смены состояний механическая кнопка может производить многократные переключения (дребезг контактов в течение 1-10 миллисекунд) вследствие чего микроконтроллер может обнаружить несколько ложных нажатий при одном фактическом. Чтобы избежать подобной ситуации необходимо использовать программное подавление дребезга контактов. Для этого следует проверять состояние кнопки с интервалом, превышающим максимальный интервал дребезга (рис.5).
Рис.5. Тактовая диаграмма цепи с подключенной кнопкой (например BTN1)
Энкодер также подключен к порту P0:
Энкодер (датчик угла поворота) – это электромеханическое устройство, предназначенное для преобразования углового положения вала или оси в электрические сигналы. Существует два основных типа энкодеров - инкрементные и абсолютные. Инкрементный энкодер, установленный на лабораторном стенде при вращении формирует импульсы, число которых пропорционально углу поворота. Подсчет числа импульсов даст нам величину угла поворота вала энкодера относительно его начального положения, а порядок следования импульсов дает направление вращения. Такой тип энкодеров не формирует импульсы в состоянии покоя. Инкрементные энкодеры обычно применяются в индустриальных средствах управления, а также в бытовой технике для установки параметров процессов, таких как время, номер программы и т.д.
Схема подключения энкодера к микроконтроллеру аналогична подключению кнопок. Сигнальные выводы энкодера ENCA и ENCB подключаются к порту ввода вывода микроконтроллера P0. Для защиты от дребезга контактов дополнительно используются конденсаторы 0.01 мкФ (рис.3).
Когда ручка энкодера стоит неподвижно – на входах микроконтроллера присутствуют логические единицы. Когда ручку энкодера поворачивают, на выводах микроконтроллера появляются два прямоугольных сигнала сдвинутых друг относительно друга. От направления вращения вала энкодера зависит, какой из сигналов будет опережать другой (табл.1).
Таблица 1. Варианты состояний контактов энкодера
|
Контакт |
Нет вращения вала |
Вращение вала по часовой стрелке |
Вращение вала против часовой стрелки |
|
ENCA |
|
|
|
|
ENCB |
|
|
|
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.