Ситуационная осведомленность:
1.Внешние угрозы
· Соседние автомобили
· Пешеходы
· Ямы в дорожном покрытии
2.Внутренние угрозы:
· Отказ электронной системы
· Отказ двигателя
3.Ресурсы:
· Топливо
· Тормозные колодки
· Масло моторное
· Омыватель
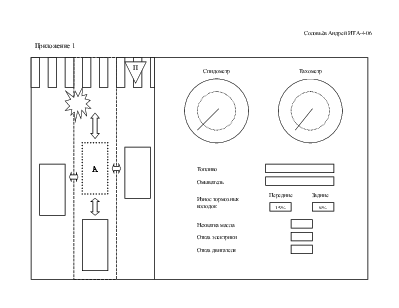
Описание работы системы:
На информационном поле (Приложение 1) представлена информация необходимая оператору для управления автомобилем “вслепую”. В левой части экрана представлено положение машина на дороге. Благодаря датчикам, расположенным с каждой стороны машины, система “видит” соседние машины, пешеходы и дорожные ямы. Вычисляется расстояние до препятствий и оператору даются рекомендации по его действиям (например: притормозить, взять влево или вправо, остановиться и т.д.). В случае нулевой реакции оператора, система самостоятельно производит данные действия во избежание критичных ситуаций. Примерная ситуация рассмотрена в Приложении 1, где на дороге имеются яма, пешеход и соседние машины. Датчики определяют габариты машин и препятствий, а посредствам этого вся необходимая информация появляется на информационном экране.
В случае отказа системы оператор будет предупрежден о неполадках, благодаря датчикам неисправности электронной системы или неисправности двигателя. Лампа “Нехватка масла” загорается при недостаточном уровне масла в двигателе.
Необходимая информация о ресурсах размещается в левой части информационного экрана. Информация о количестве оставшегося топлива, омывателя (особенно актуально в зимний период, т.к. слякоть и реагенты накладываются на датчики, что является потерей зрения системы) и ресурса выработки тормозных колодок.
Задачи системы:
Способы решения задач:
Задачи могут решаться оператором только при наличии всей необходимой информации об исправности автомобиля и информации об окружающей обстановке, т.к. управление автомобилем производится оператором “вслепую”, то есть только по данным на информационном поле в автомобиле. Оператор должен следовать подсказкам системы и стараться не доводить ситуацию до критичных положений. Реакция система на ямы представлена только в качестве предупреждения, то есть если оператор не предпринял никаких действий, машина продолжит движение по маршруту.
В случае нулевой реакции оператора на рекомендации системы, система сама производит следующие действия:
Например, если при рекомендации остановиться подается звуковая команда и загорается стрелка обозначающая расстояние между соседней машиной или препятствием, оператор не принимает никаких действий, система предпринимает экстренное торможение автомобиля.
Это происходит в случае когда система высчитывает что автомобиль не успеет проехать на безопасном расстоянии от пешехода (в основу берется скорость движения машины, скорость движения пешехода и за траекторию принимается перпендикулярная дороге линии, т.к. это будет являться кратчайшим и самым быстрым путем, т.е. пешеходу дается преимущество для обеспечения безопасности).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.