![]() Δ=(4,9-4,9)4,9*100%=0
Δ=(4,9-4,9)4,9*100%=0
![]() Δ=(4,31-4,313)/4,31*100%=0,07%
Δ=(4,31-4,313)/4,31*100%=0,07%
![]() Δ=(3,14-3,141)/3,14*100%=0,03%
Δ=(3,14-3,141)/3,14*100%=0,03%
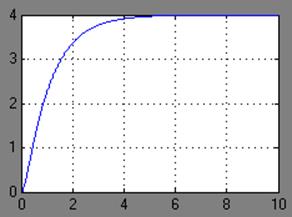
При увеличении Т, переходная хар-ка становится более мягкая.
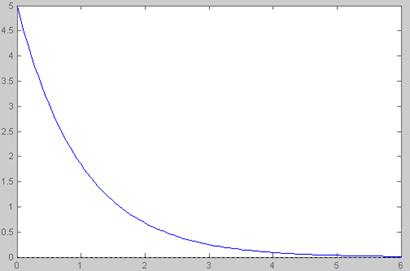 2.2.2. Получить импульсную характеристику
апериодического звена при исходных значениях К1 и Т1.
2.2.2. Получить импульсную характеристику
апериодического звена при исходных значениях К1 и Т1.
2.2.3 Получить переходные характеристики при последовательном соединении двух апериодических звеньев с коэф. передачи k1 и k2 и постоянными времени T1 и T2.

 При последовательном соединении звеньев передаточная
функция находится
При последовательном соединении звеньев передаточная
функция находится  ;Эта функция похожа на переходную
функцию колебательного звена при T=0.4 и ξ=1.45.
;Эта функция похожа на переходную
функцию колебательного звена при T=0.4 и ξ=1.45. 

Δ=(3.4-3.4)3.4*100%=0
2.2.4 Получить переходные характеристики при параллельном соединении двух апериодических звеньев с различными знаками.
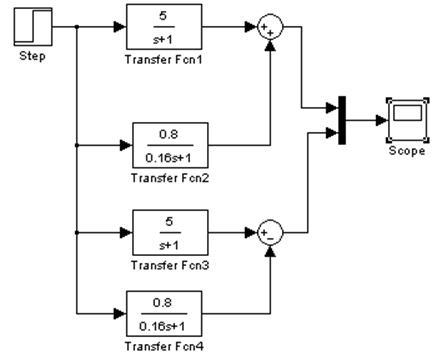
В случае параллельного соединения звеньев передаточная функция  ;
;
При отрицательной связи  ;
;
 .
.
При положительной связи  ;
;
 .
.
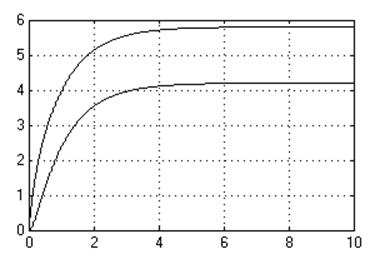
Верхняя функция получена при положительной связи, а нижняя при отрицательной связи. Установившиеся значения для них 5,8 и 4,2 соответственно.
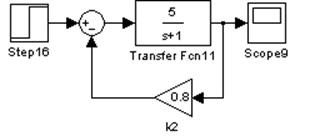
2.2.5. Исследовать влияние безынерционной отрицательной (пол.) обратной связи с коэффициентом передачи k2 на переходную характеристику апериодического звена при выполнении следующих требований 1. k1*k2=1 2. k1*k2>1 3. k1*k2<1
Сначала исследуем ООС
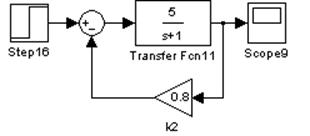
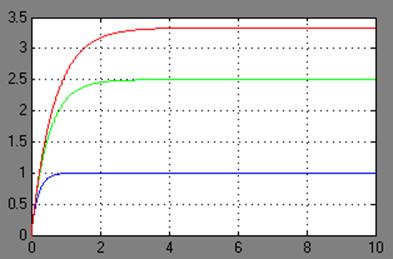
На графике для верхней функции k2=0.1
(k1*k2=5*0.1=0.5<1),
для средней k2=0.2 (k1*k2=5*0.2=1), для нижней k2=0.8
(k1*k2=5*0.8=4>1).
В общем случае 
Установившиеся значения для выходной переменной
1.при k2=0.1  ,
,  .
.
Δ=(2.58-2.57)2.58*100%=0.3%
2.при k2=0.2  ,
, ![]()
![]()
Δ=(2.16-2.161)2.16*100%=0.04
3.при k2=0.8  ,
, ![]()
![]()
Δ=(0.99-0.99)0.99*100%=0
При увеличении k2 переходный процесс протекает за меньшее время и достигает меньшего установившегося значения.
Теперь исследуем ПОС
Слева функция при k2*k1=0.2*5=1, справа k1*k2=5*0.1=0.5<1

Если k2=0.2, то  , h(t)=5t. h(2)=10 Δ=(10-10)10*100%=0
, h(t)=5t. h(2)=10 Δ=(10-10)10*100%=0
Если k2=0.1, то  ,
, ![]()
![]()
Δ=(6.2-6.2)6.2*100%=0
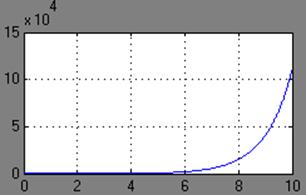 На этом рисунке k1*k2>1 (k2=0.4).
На этом рисунке k1*k2>1 (k2=0.4).
При к2=0,4  ,
, ![]() .
.![]()
Δ=(1.4*104-1.4*104) 1.4*104*100%=0
При больших k2
характеристика изменяет вид.
2.3.Колебательное звено.

Исследовать влияние k3, T,ξ колебательного
звена на прямые показатели качества и установившееся значение выходной
переменной при соблюдении следующих условой:
ξ=1, ξ>1, ξ <1, ξ=0. Сравнить переходную характеристику колебательного звена при заданных значениях параметров с временными зависимостями, полученными в пункте 2.2.3 и пункте
2.2.4 для случая параллельного соединения со знаком (-).
Сначала исследуем влияние ξ (k=4.2 и T=0.4):
Выше расположена кривая ξ=1, ниже ξ=2.
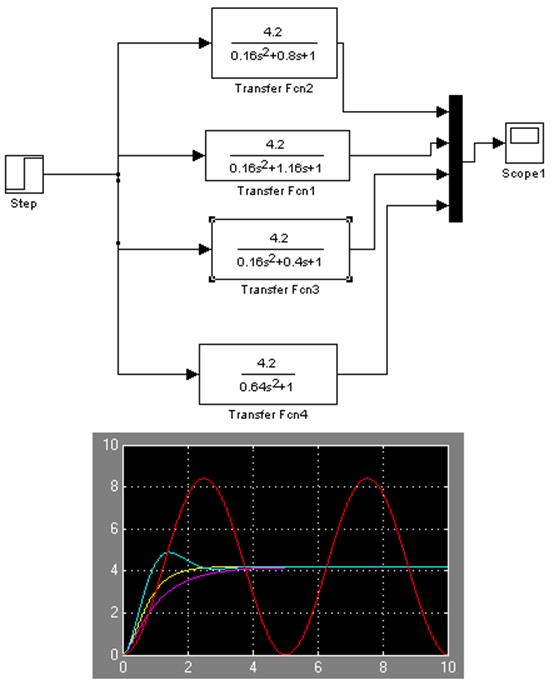
При ξ=1  , p1,2=-1/T=-2.5
, p1,2=-1/T=-2.5
![]()
![]() Δ=(2.982-2.98)2.982*100%=0.06%
Δ=(2.982-2.98)2.982*100%=0.06%
При ξ=2  , p1,2=-5±2.5
, p1,2=-5±2.5![]()
![]()
![]() Δ=(2.673-2.67)/2.673*100%=0.06%
Δ=(2.673-2.67)/2.673*100%=0.06%
При ξ=0.2  , p1,2=-0.5±i
, p1,2=-0.5±i![]()
![]() .
.
![]() .
Δ=(4.12 -4.11)/4.12*100%=0.002%
.
Δ=(4.12 -4.11)/4.12*100%=0.002%
При ξ=0  ,.
,.![]()
![]() Δ=(7.61-7.612)/7.612*100%=0.003%
Δ=(7.61-7.612)/7.612*100%=0.003%
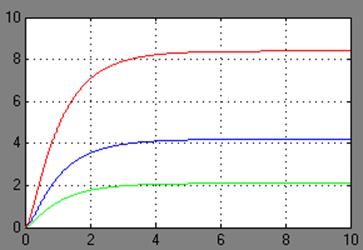
Теперь исследуем влияние k (T=0.4 и ξ=1.45 ):
Для верхней кривой k=8.4, для средней k=4.2 для нижней k=2.1.
Видно, что с увеличением k выходная переменная
пропорционально изменяет свои значения.
 В общем случае
В общем случае 
и 
Для случая к=4.2 
Ошибки моделирования:
 Δ=(2,359-2,3622)/2,3622*100%=0,135%
Δ=(2,359-2,3622)/2,3622*100%=0,135%

Δ=(3,523-3,523)/3,5230%*100%=0%
Время регулирования:  → tр.=3,17;
→ tр.=3,17;
Установившееся значение  Равенство
установившегося значения, найденного аналитически теоретическому значения
выполняется.
Равенство
установившегося значения, найденного аналитически теоретическому значения
выполняется.
Теперь исследуем влияние T(k=4.2 и ξ=1.45):
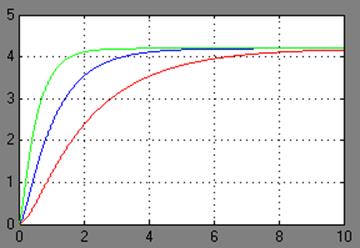 Для верхней кривой T=0.2,
Для верхней кривой T=0.2,
для средней T=0.4,
для нижней T=0.8.
Чем меньше T, тем быстрее процесс приходит к установившемуся состоянию.
T=0.2  ,
,
 .
.
T=0.8  ,
,
 .
.
3.4. Звено чистого запаздывания.
Исследовать влияние k1 и τ на переходные характеристики звена чистого запаздывания.
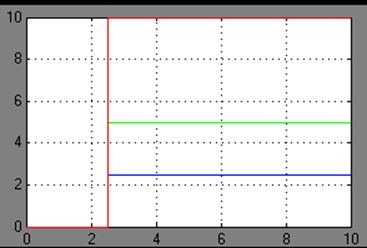 Исследуем влияние коэф. передачи.(τ=2,5)
Исследуем влияние коэф. передачи.(τ=2,5)
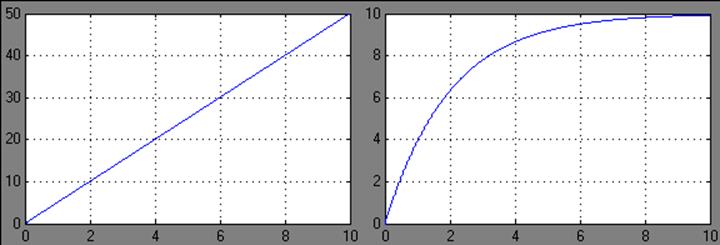
Для верхней функции k1=10, средней-k1=5, нижней-k1=2.5
1.k1=10 ![]() , h(t)=10(t-2.5).
, h(t)=10(t-2.5).
2.k1=5 ![]() , h(t)=5(t-2.5).
, h(t)=5(t-2.5).
3. k1=2.5 ![]() , h(t)=2.5(t-2.5).
, h(t)=2.5(t-2.5).
Для любого выбранного момента времени ошибка моделирования равна нулю.
Чем выше k1, тем больше
установившееся значение выходной переменной.
Исследуем влияние постоянной времени запаздывания (k1=5):
Для крайней левой кривой τ=1,25, в середине τ=2,5 , для самой правой τ=5.
Чем меньше τ, тем быстрее выходная переменная достигнет установившегося значения.
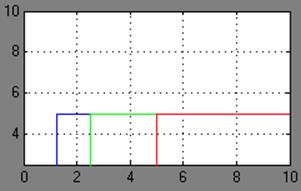 1.τ=1.25
1.τ=1.25 ![]() , h(t)=5(t-1.25).
, h(t)=5(t-1.25).
2. τ=2.5 ![]() , h(t)=5(t-2.5).
, h(t)=5(t-2.5).
3. τ=5 ![]() , h(t)=5(t-5).
, h(t)=5(t-5).
Для любого выбранного момента времени ошибка моделирования равна нулю.
Вывод:
На лабораторной работе мы изучили переходные характеристики линейных динамических звеньев (интегрирующее, апериодическое, запаздывания, колебательное). Исследовали влияние на переходные характеристики таких факторов как коэффициент передачи, постоянная времени, коэффициент затухания, время запаздывания. Использовали различные способы соединения звеньев.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.