







НОВОСИБИРСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
Кафедра “Автоматизации производственных процессов в машиностроении”
ЗАДАНИЕ НА КУРСОВУЮ РАБОТУ
“Анализ и синтез линейной системы автоматического управления”
Исходные данные для проектирования:
- номер варианта таблицы уравнений структурной схемы 7;
- номер варианта таблицы параметров объекта управления 9;
- допустимая скоростная ошибка регулирования 0,005;
- максимально – допустимое время регулирования 0,5;
- максимально – допустимое перерегулирование 30%;
Содержание пояснительной записки:
- определение ошибки регулирования по управляющему и возмущающему воздействию в установившемся процессе;
- исследование устойчивости исходного объекта управления;
- определение требуемого коэффициента передачи последовательного корректирующего устройства;
- синтез линейной САУ на основании метода желаемых логарифмических частотных характеристик;
- проверка результатов синтеза методом цифрового моделирования.
Новосибирск 2006 г.
Исходные данные:
 |
Алгебраические уравнения исходной САУ:
![]()
Структурная схема:
где: x – задающее воздействие; z – возмущающее; xi – входная переменная i – ого звена; yi – выходная переменная i – ого звена; y=y1 – выходная переменная (управляемая) переменная САУ.
Параметры динамических звеньев исходной САУ:


1. Система обыкновенных дифференциальных уравнений, описывающая динамику исходной САУ:
2. Желаемые показатели качества переходных процессов и статическая точность регулирования:
-
допустимая скоростная ошибка регулирования: ![]()
-
максимально – допустимое время регулирования: ![]()
-
максимально – допустимое перерегулирование: ![]()
 Анализ
линейной САУ:
Анализ
линейной САУ:
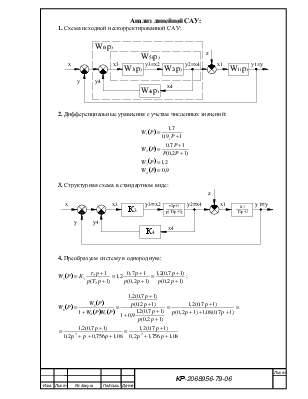
1. Схема исходной нескорректированной САУ:
2. Дифференциальные уравнения с учетам численных значений:
3. Структурная схема в стандартном виде:
4. Преобразуем систему в однородную:
 ;
;
Сократим на 1,08:
 , где
, где
1,1 – звено пропорциональности;
(0,7p+1) – форсирующее звено;
 – колебательное звено.
– колебательное звено.
Колебательное звено в общем виде:
 ; найдем
; найдем ![]() для нашего случая:
для нашего случая:
![]()
 , так как
, так как ![]() >1,
то заменим колебательное звено двумя
>1,
то заменим колебательное звено двумя
апериодическими:
D=1,9
 ;
; 
 ;
; 
Получим:
 .
.
Одноконтурная структурная схема:
Передаточная функция разомкнутой САУ:

где
![]()
5. Передаточная функция замкнутой САУ по задающему x воздействию:
 |

По возмущающему z воздействию:
Уравнение замкнутой системы в дифференциальной форме y=F(x;y) имеет вид:
Запишем уравнения в дифференциальном виде:

Определим статическую ошибку в случае приложения единичного ступенчатого сигнала:


Найдём статическую ошибку:


6. При помощи алгебраического критерия устойчивости Гурвица проверим условие устойчивости нескорректированной САУ:
![]()
Подставим численные значения:
![]()
1.  , условие выполняется
, условие выполняется
2.  , условие выполняется
, условие выполняется
7. Выполним моделирование с помощью ЭВМ в программе MATLAB. Для моделирования используется исходная структурная схема, в которой все элементы представлены типовыми звеньями.
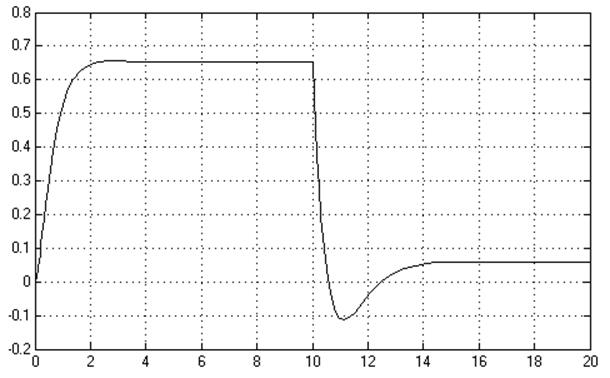
Рис.1. Модель исходной системы.
Проанализируем систему:
1. ![]() ;
; ![]()
![]()
2. Определим статическую ошибку.
 Для ступенчатого сигнала по x:
Для ступенчатого сигнала по x:
![]()
Для ступенчатого сигнала по возмущению:
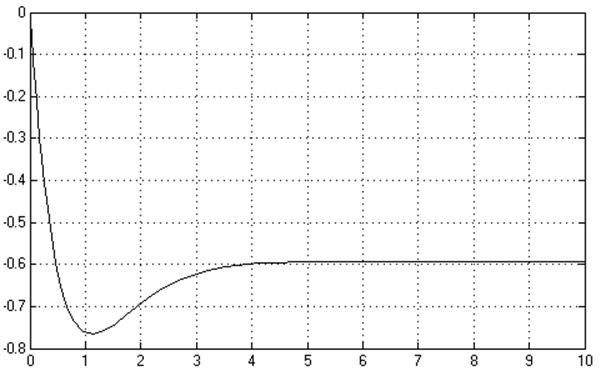
Рис.2. Подача ступенчатого сигнала по возмущению.
![]()
Вывод: Переходные процессы получаем как реакцию системы на единичные ступенчатые задающее и возмущающее воздействия при нулевых начальных значениях выходных величин всех типовых звеньев. На рис.1 и 2 представлены графики переходных процессов при подаче единичного ступенчатого сигнала по управлению и возмущению
Время переходного процесса ![]() ;
;
Перерегулирование отсутствует.
Статическая ошибка при
подаче единичного ступенчатого сигнала по задающему воздействию равна ![]() , что соответствует результатам вычисления.
Статическая ошибка при подаче единичного ступенчатого сигнала по возмущающему
воздействию равна
, что соответствует результатам вычисления.
Статическая ошибка при подаче единичного ступенчатого сигнала по возмущающему
воздействию равна ![]() , что также соответствует
результатам вычисления.
, что также соответствует
результатам вычисления.
Синтез последовательного корректирующего устройства
на основании метода желаемой ЛАЧХ.
1. Изображаем асимптотическую ЛАЧХ нескорректированной системы Lнс(ω) с использованием логарифмического масштаба ω. Продольную ось L(ω) проводим через единичную частоту ω=1. (Рис.3. линия Lнс(ω))
Определим характеристики для соответствующих звеньев:
пропорциональное
звено: ![]() ;
;
форсирующее звено:  ;
;
апериодическое звено:  ;
;
апериодическое звено:  ;
;
апериодическое звено:  .
.
2. Строим желаемую ЛАЧХ астатической скорректированной САУ Lжел(ω), обеспечивающей заданные показатели качества переходных процессов s%=30%, tр=0,5 и требуемую скоростную ошибку Δyдоп(∞)=0,005, которая состоит из низкочастотной, среднечастотной и высокочастотной области.
Построение желаемой ЛАЧХ:
- наклон НЧ области желаемой ЛАЧХ принимаем равным -20дБ/дек. Требуемый разомкнутый коэффициент передачи kтр скорректированной системы определяем как:
![]()
- по номограммам, задавшысь требуемыми значениями перерегулирования
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.