








Министерство образования и науки Российской Федерации
Федеральное агентство образования
Государственное учреждение высшего профессионального образования
«НОВОСИБИРСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ»
Кафедра АППМ
По дисциплине:
«Теория автоматического управления»
На тему:
«Анализ и синтез линейной системы автоматического управления»
Факультет: МТ
Специальность: 2102
Группа: КП-32
Студент: Калмыков И.И.
Преподаватель: Нос О.В.
Работа защищена:_____________
НОВОСИБИРСК
2006г.
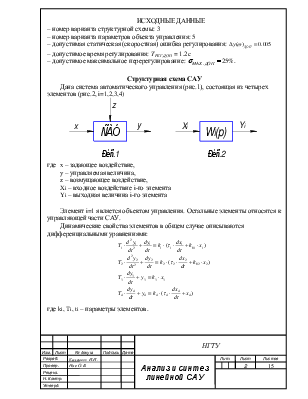
ИСХОДНЫЕ ДАННЫЕ
– номер варианта структурной схемы: 3
– номер варианта параметров объекта управления: 5
–
допустимая статическая (скоростная) ошибка регулирования: ![]()
– допустимое время регулирования: TРЕГ.ДОП= 1.2c
– допустимое
максимальное перерегулирование: ![]() 25%.
25%.
Структурная схема САУ
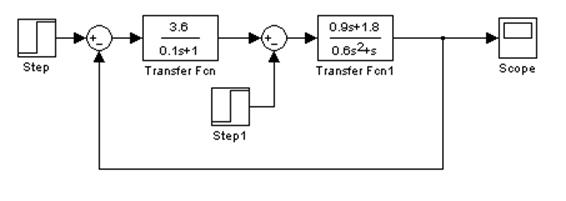
Дана система автоматического управления (рис.1), состоящая из четырех элементов (рис.2, i=1,2,3,4)
где x – задающее воздействие,
y – управляемая величина,
z – возмущающее воздействие,
Xi – входное воздействие i-го элемента
Yi – выходная величина i-го элемента
Элемент i=1 является объектом управления. Остальные элементы относятся к управляющей части САУ.
Динамические свойства элементов в общем случае описываются дифференциальными уравнениями:
где ki, Ti, ti – параметры элементов.
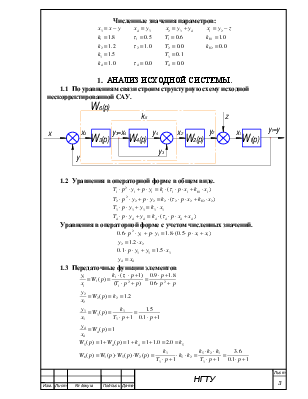
Численные значения параметров:
1. АНАЛИЗ ИСХОДНОЙ СИСТЕМЫ.
1.1 По уравнениям связи строим структурную схему исходной нескорректированной САУ.
1.2 Уравнения в операторной форме в общем виде.
Уравнения в операторной форме с учетом численных значений.
1.3 Передаточные функции элементов
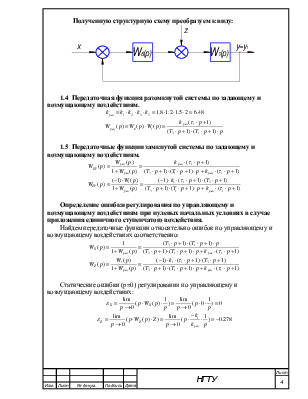
Полученную структурную схему преобразуем к виду:
1.4 Передаточная функция разомкнутой системы по задающему и возмущающему воздействиям.
1.5 Передаточные функции замкнутой системы по задающему и возмущающему воздействиям.
Определение ошибки регулирования по управляющему и возмущающему воздействиям при нулевых начальных условиях в случае приложения единичного ступенчатого воздействия.
Найдем передаточные функции относительно ошибок по управляющему и возмущающему воздействиях соответственно:


Статические ошибки (p=0) регулирования по управляющему и возмущающему воздействиях:


1.6 Проверка устойчивости системы по критерию Гурвица.
Так как в исследуемой САУ нет звена чистого запаздывания, то ее устойчивость можно установить по критерию Гурвица.
Формулировка критерия:
Для того, чтобы линейная САУ была устойчива, необходимо и достаточно, чтобы главный определитель матрицы Гурвица и все его n-1 диагональные миноры были положительными.
Матрица Гурвица составляется из коэффициентов характеристического уравнения заданной системы по определенным правилам.
Характеристическое уравнение заданной системы.
В критерии Гурвица характеристическое уравнение задается в виде операторного полинома при выходной координате Y:
![]()
Чтобы получить характеристическое уравнение заданной системы, приравняем нулю знаменатель заданной САУ и раскроем скобки:
![]() ,
,
Обозначим коэффициенты и найдем их значения:
![]() ,
,
![]() ,
,
![]() ,
,
![]() .
.
Все коэффициенты характеристического уравнения положительны – необходимое условие устойчивости выполняется.
Составление матрицы Гурвица и определение устойчивости САУ.
Составляем матрицу Гурвица:
Условия устойчивости:
1) ![]() ,
,
2) ![]() .
.
По условию Гурвица, система является устойчивой.
1.7 Показатели качества переходных процессов при моделировании на ЭВМ. Для моделирования используется структурная схема, в которой все элементы представлены в виде типовых линейных звеньев.
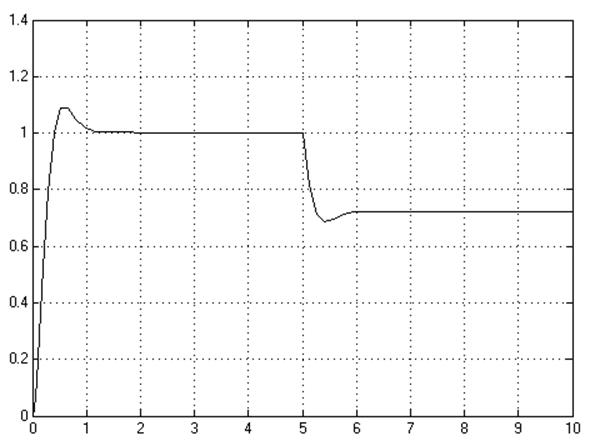
Переходная характеристика при задающем и возмущающем воздействиях этой системы имеет следующий вид:
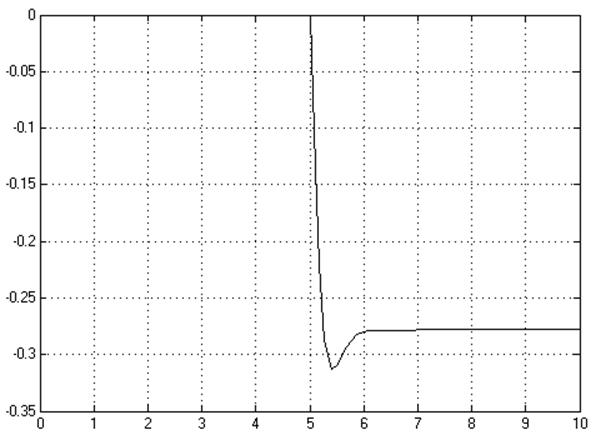
Переходная характеристика при возмущающем воздействии этой системы имеет следующий вид:
Вывод: 1) статическая ошибка при подаче единичного ступенчатого сигнала по задающему воздействию равна 0, что соответствует результатам вычисления.
2) статическая ошибка при подаче единичного ступенчатого сигнала по возмущающему воздействию равна -0.278, что также соответствует результатам вычисления.
3) ![]()
4) перерегулирование ![]()
2. СИНТЕЗ ПОСЛЕДОВАТЕЛЬНОГО КОРРЕКТИРУЮЩЕГО УСТРОЙСТВА ДЛЯ САУ.
2.1
Построение асимптотической ЛАЧХ нескорректированной системы – ![]() в разомкнутом
состоянии.
в разомкнутом
состоянии.
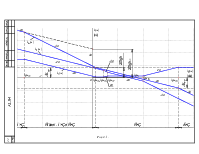
При построении ЛАЧХ системы, состоящей из последовательных типовых звеньев учитывается, что логарифм произведения есть сумма логарифмов, поэтому для каждого звена можно построить ЛАЧХ, а затем просуммировать и получить ЛАЧХ всей системы.
Для
построения ![]() рассчитываем необходимые параметры:
рассчитываем необходимые параметры:
1)
![]() дБ
дБ
2) частоты сопряжения системы:
![]() рад/с,
рад/с,
![]() рад/с,
рад/с,
![]() рад/с.
рад/с.
По
оси абсцисс возьмем равномерный логарифмический масштаб ![]() .
Поэтому частоты сопряжения пересчитываем в десятичные логарифмы частоты:
.
Поэтому частоты сопряжения пересчитываем в десятичные логарифмы частоты:
![]() дек,
дек,
![]() дек,
дек,
![]() дек.
дек.
В координатной плоскости [L(w), lgw] при частоте w=1(lg1 = 0 дек) отложим ординату 20lgk и логарифмы частот сопряжения (рис. 2.1.).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.