Определим интегральную оценку качества переходного процесса:
I = ∫ | h(t)-hуст
| dt = ![]() | h(i∙∆t)- hуст
| ∙∆t =51,57 ·0,1=5,157
| h(i∙∆t)- hуст
| ∙∆t =51,57 ·0,1=5,157
Построим в одной плоскости и в разных масштабах кривые С0=f(C1) и I=f(C1). При анализе полученных кривых можно сделать вывод, что точка, находящаяся правее максимума имеет настроечные параметры регулятора, при которых переходный процесс получается высокого качества.
Рис. 4.16. Кривые С0=f(C1) и I=f(C1).
6. Структурная схема автоматизации
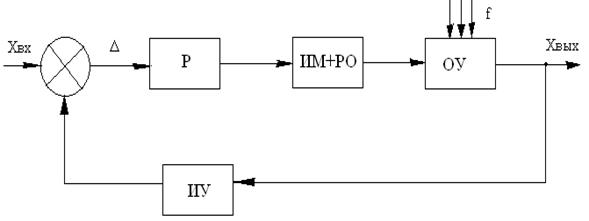
Рис 6.1. Структурная схема автоматизации регулирования уровня воды в деаэраторе
На схеме изображены следующие структурные элементы:
Р – регулятор (технологический контроллер многоблочный ТКМ52);
ИМ+РО – исполнительный механизм и регулирующий орган – исполнительное устройство (электропривод типа МЭО-250/25+задвижка);
ОУ – объект управления (уровень воды в деаэраторе);
ИУ – измерительное устройство (датчик «Метран-43ДД»).
7. Выбор технических средств автоматизации.
7.1. Выбор регулятора
В качестве микроконтроллера для более точной работы системы автоматического регулирования применим технологический контроллер многоблочный ТКМ52.
Назначение и область применения устройства.
ТКМ52 (Рисунок 7.1.) является приемником контроллера ТКМ 51, в том смысле, что он имеет такой же конструктив, те же модули ввода – вывода и блок клавиатуры и индикации. Отличие состоит в том, что в ТКМ52 используется РС - совместимый процессорный модуль. Контроллер ТКМ52 предназначен для сбора, обработки информации и формирования воздействия на объект управления (промышленное оборудование) в составе распределенных иерархических или локальных автономных АСУ ТП на основе сети Ethernet или RS-485 (Modbus).

Рисунок 7.1. Внешний вид контроллера ТКМ52
Контроллер может использоваться:
· как автономное устройство управления небольшими объектами;
· как удаленный терминал связи с объектом в составе распределенных систем управления;
· одновременно как локальное устройство управления и как удаленный терминал связи с объектом в составе сложных распределенных систем управления.
Контроллер в дублированном режиме рассчитан на применение в высоконадежных системах управления.
Автономное применение
В этом варианте управление объектом производится прикладной программой, написанной пользователем. Прикладная программа хранится в энергонезависимой памяти контроллера. В контроллер, в зависимости от вариантов исполнения, может устанавливаться одна из операционных систем: DOS или Системное Программное Обеспечение (СПО) на базе OS Linux. В первом случае программирование МФК можно осуществлять посредством универсальных средств программирования либо с помощью программы TraceMode. В случае применения СПО достигается наиболее полное использование ресурсов контроллера. СПО содержит многозадачную операционную систему Linux, сервер ввода-вывода и пользовательские библиотеки. Программирование контроллера осуществляется с помощью кроссовой системы программирования ТесоnСХ. Загрузка подготовленных прикладных программ в память контроллера для отладки производится либо по последовательному каналу, либо по сети Ethernet, используя протокол TCP/IP. Отладка программ на работающем контроллере в дистанционном режиме поддерживается системой ТесоnСХ.
Для программирования контроллера МФК с установленным СПО можно использовать другие популярные средства, в частности, ISaGRAF. К контроллеру, работающему автономно, можно подключить различные внешние периферийные устройства по последовательным (RS-232 и RS-485) и параллельному интерфейсу, а также по сети Ethernet. В качестве пульта оператора-технолога может использоваться встроенный блок клавиатуры и индикатора V03. В автономном применении контроллер решает задачи средней информационной емкости (50...200 каналов).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.