






















процессов получить его основные параметры: перерегулирование, время первого согласования, время переходного процесса, скорость нарастания тока.
Пример выполнения задания на моделирование приведён в пункте 1.2.
Задача: Необходимо провести моделирование по структурной схеме, приведённой на рисунке 1, и получить график переходного процесса скорости (график переходного процесса тока необходимо получить самостоятельно).
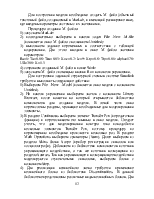
На схеме НЗ – нелинейное звено, представленное на рисунке 1.2.
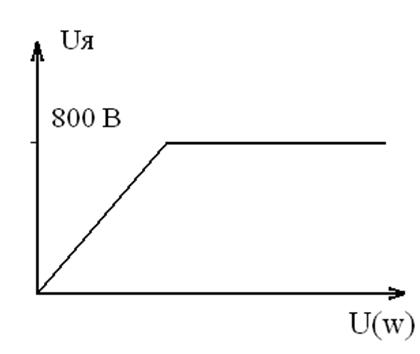
Рисунок 1.2 – Функция работы нелинейного звена
Параметры нелинейного звена:
Коэффициент наклона (К): 1.5;
Верхний ограничительный предел (Uверх): 300 В;
Параметры структурной схемы заданы в таблице 1.
Таблица 1.1 – параметры структурной схемы
|
Rя, Ом |
Тя, с |
Тм, с |
КФ |
Uя, В |
Ic, А |
Ктп |
Ттп, с |
α |
|
6 |
0.08 |
0.05 |
0.2 |
220 |
9 |
0.8 |
0.06 |
170° |
Данный способ моделирования производится путём построения структурной схемы, аналогичной заданной, в системе моделирования Simulink.
Таблица 1.2– Таблица кодирования параметров
|
В схеме |
α |
Rя |
Tя |
Тм |
KФ |
Ic |
Kтп |
Ттп |
K |
Uверх |
|
В программе |
alpha |
Ra |
Ta |
Tm |
Koc |
Ic |
Kp |
Tp |
K |
UB |
Для построения модели необходимо создать М–файл (обычный текстовый файл, создаваемый в MatLab, и имеющий расширение mat), где введены параметры системы с их значениями.
Процедура создания М–файла:
1) запускаем MatLab;
2) последовательно выбираем в панели задач File→New→M-file (появляется окно М–файла с названием Untitled);
3) выполняем задание переменных в соответствии с таблицей кодирования. Для этого вводим в окне М–файла значения параметров:
Ra=6; Ta=0.08; Tm=0.05; Koc=0.2; Ic=9; Ktp=0.8; Ttp=0.06; alpha=170; UB=300; K=1.5
4) сохраняем созданный М–файл в папке Work;
5) запускаем М–файл с помощью кнопки Run на панели управления.
Для построения заданной структурной схемы в системе Simulink требуется выполнить следующие действия:
1) Выбираем File→New→Model (появляется окно модели с названием Untitled).
2) На панели управления выбираем значок с названием Library Browser, после нажатия на который открывается библиотека компонентов для создания модели. В левой части окна перечислены разделы, хранящие необходимые для моделирования элементы.
3) В разделе Continuous выбираем элемент Transfer Fcn (передаточная функция) и перетаскиваем его мышью в окно модели. Следует учесть, что для моделирования контура тока понадобится несколько элементов Transfer Fcn, поэтому процедуру по перемещению необходимо произвести несколько раз. В разделе Math Operations выбираем сумматоры (Sum). Далее выбираем из раздела Skins блоки Scope (прибор регистрации сигналов или «осциллограф»). Добавляем из библиотеки компонентов источник управляющего воздействия, а так же источник возмущения из раздела Sourses. Так как управляющее и возмущающее воздействия моделируются ступенчатыми сигналами, выбираем блоки с названием Step.
4) Для реализации нелинейного звена требуется применение нелинейного блока из библиотеки Discontinuities. В данной библиотеке представлены различные виды нелинейных блоков. Для выполнения задания, указанного выше, требуется применение блока ограничения Saturation. Так же для задания коэффициента наклона у нелинейного звена потребуется блок под названием Gain (усилитель) из раздела Math Operations.
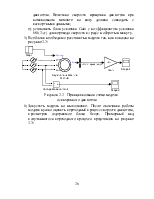
5) Размещаем все блоки согласно схеме, изображённой на рисунке 1.3 и устанавливаем связи между блоками, соединяя их однонаправленными линиями.
Рисунок 1.3 – Модель заданной системы
Двойным кликом мыши по блоку можно открыть его для редактирования. Таким образом, необходимо подставить в блоки соответствующие параметры (в общем виде) согласно схеме, изображенной на рисунке 1.3.
Процедура задания параметров блоков в модели:
а) в блоке, задающем управляющий сигнал (блок Step на входе системы), необходимо задать величину управляющего воздействия (в строку final value): α=170°.
б) в блоке ограничения Saturation в пункте Upper limit (верхний предел) заносится значение UB (UB=300 B) и в пункте Lower limit (нижний предел) заносится значение 0.
в) в блоке, устанавливающем величину возмущающего воздействия (блок Step), необходимо задать время приложения нагрузки в секундах (строка Step time). Задаем момент времени приложения тока статического, равный 3 секунды, считая от момента пуска двигателя. Таким образом, предполагаем, что переходный процесс по управляющему воздействию закончится раньше, чем через 3 секунды и лишь затем начнётся переходный процесс отработки возмущающего воздействия. Далее необходимо задать величину возмущающего воздействия (в строке final value задаём значение Ic).
В меню следует выбрать Simulation→Configuration parameters и в графах Start time и Stop time установить время начала и конца работы модели в секундах (для нашего случая время начала 0, а время
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.