- граничный апериодический;
- с 20%-ным перерегулированием;
- с
минимальной квадратичной площадью отклонения;(![]() )
)
В нашем случае выбираем апериодический переходный процесс с 20% перерегулированием.
t2* - время в течении которого желательно окончание переходного процесса.
T=0,36 сек.
t = 0,72 сек.
Для выбора
регулятора задаёмся величиной времени регулирования ![]() сек,
в течении которого желательно окончание переходного процесса.
сек,
в течении которого желательно окончание переходного процесса.
Определяем
величину ![]() .
.
 |
По номограмме видно, что точка находиться между П и ПИД регуляторами, однако она лежит ближе к зоне ПИД регулятора, поэтом в данном случае выберем его.
2.5. Определение настроечных параметров регулятора.
2.5.1Табличный метод.
Задача настройки заключается в том, чтобы в заданной системе регулирования выбрать и установить параметры регулятора, обеспечивающие близкий к оптимальному процесс регулирования. Существуют табличные и расчетные методы определения настроечных параметров регулятора.
1) Заключается в определении типа передаточной характеристики.
2) В соответствии с выбранным законом регулирования определить оптимальные настроечные параметры регулятора.
3)
К объекта, ![]() и Т выбрать из
передаточной функции наиболее точного способа идентификации.
и Т выбрать из
передаточной функции наиболее точного способа идентификации.
Способность объекта приходить после возмущения в новое установившееся состояние без вмешательства регулятора называется свойством самовыравнивания объекта.
Объекты, обладающие этим свойством называются статическими объектами.
4) Ввести в АСОТАР настроечные параметры регулятора и построить переходную характеристику замкнутой системы.
5) Определение качества регулирования.
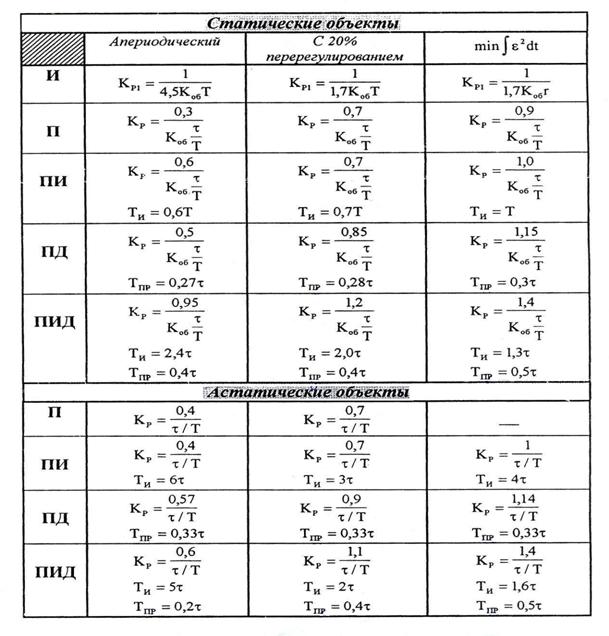
Рис. 2.12. Таблица для определения параметров регулятора.
Следует отметить, что эти формулы не обеспечивают высокой точности, поэтому их применяют обычно для грубых прикидочных расчетов.
Объект – статический, закон с 20% перерегулированием, ПИД-регулятор.
Таким образом, исходя из вышеприведенных формул настроечные параметры регулятора имеют следующие значения:
![]()
![]()
Отсюда: С0=kp/Tи=0,0028; C1=kp=0,004; C2=kp*Tд=0,0009.
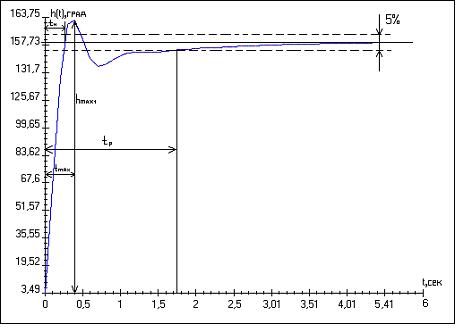
Рисунок 2.13. График переходного процесса замкнутой системы.
Определяем параметры качества регулирования:
Интегральная оценка качества получившегося переходного процесса.
Определим передаточную функцию системы:

Определим выражение для сигнала на выходе системы:
![]()
Определим интеграл от выражения (h(t)-hуст), который и будет являться интегральной оценкой качества переходного процесса:

Определим показатели качества получившегося переходного процесса.
1) Время переходного процесса tp=1,73 секунд;
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.