Нелинейные системы автоматического регулирования [5].
Статическая нелинейность – это нелинейность статической характеристики звена. Эти характеристики могут быть непрерывными или релейными, однозначными или с гистерезисом.
Если динамика звена системы описывается нелинейным дифференциальным уравнением, то это – динамическая нелинейность. Нелинейным является, например, уравнение движения системы при наличии вязкого или сухого трения, или уравнение, параметры которого зависят от значений переменных. Заметим, в линейных системах с переменными параметрами последние зависят от времени, в нелинейных – от координат.
Нелинейности в системах регулирования могут быть естественными и специально вводимыми для придания системе желаемых свойств.
Фазовая плоскость.
При составлении уравнений динамики системы все звенья, поддающиеся линеаризации, описываются линейными уравнениями. И только для одного-двух существенно нелинейных звеньев составляются нелинейные уравнения, или используются нелинейные характеристики. Общий вид нелинейного дифференциального уравнения:
 ,
, ![]() .
.
Пространство
координат состояния системы (![]() ) называется фазовым
пространством, в котором решение уравнения движения изображается в виде фазовой
траектории системы. Заметим, что
) называется фазовым
пространством, в котором решение уравнения движения изображается в виде фазовой
траектории системы. Заметим, что ![]() – проекции скорости изображающей
точки – текущей точки фазовой траектории.
– проекции скорости изображающей
точки – текущей точки фазовой траектории.
Ниже будут рассматриваться только системы второго порядка, которым соответствуют двухмерные пространства состояний – фазовые плоскости.
Уравнения движения стационарной системы в отсутствие внешних воздействий:
 ,
,  .
.
Дифференциальное уравнение фазовой траектории получается путём исключения времени из этой системы уравнений:
 .
.
Точки равновесного
состояния определяются нулевыми значениями скоростей ![]() ,
, ![]() .
Следовательно
.
Следовательно
![]() ,
, ![]() ,
,
что создаёт неопределённость правой части уравнения фазовой траектории. Поэтому точки равновесного состояния являются особыми точками на фазовой плоскости.
Пусть уравнения движения системы имеют вид:
 ,
,  .
.
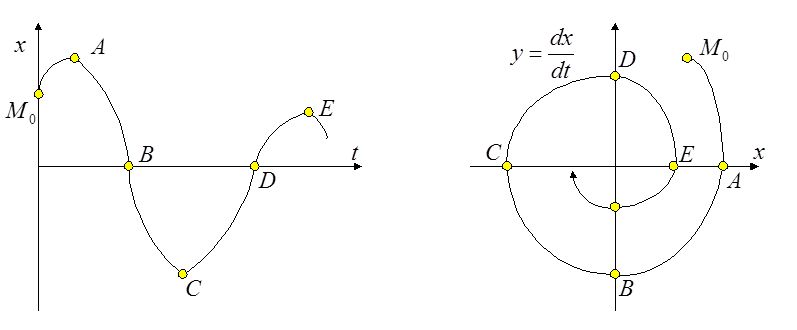
Т.е. координата y, откладываемая по оси ординат, представляет собой скорость изменения координаты x, откладываемой по оси абсцисс.
Сопоставим
изображение в виде фазовых траекторий на плоскости ![]() с
обычным его представлением в виде кривой
с
обычным его представлением в виде кривой ![]() . В этом
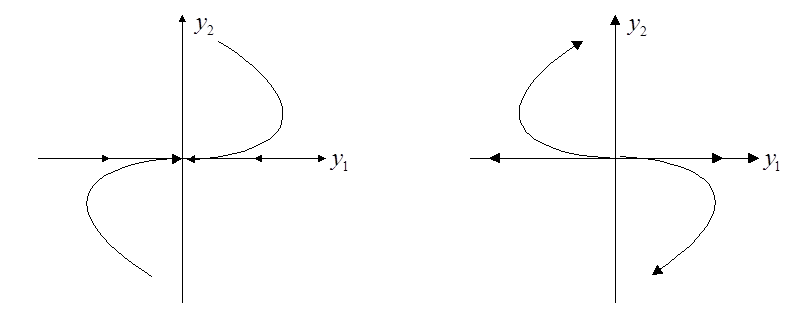
случае для изображающей точки справедливо следующее: изображающая точка
движется в верхней полуплоскости слева направо, так как там
. В этом
случае для изображающей точки справедливо следующее: изображающая точка
движется в верхней полуплоскости слева направо, так как там ![]() , а в нижней – справа налево, так как там
, а в нижней – справа налево, так как там ![]() ; ось x
пересекается фазовыми траекториями под прямым углом, так как там скорость
; ось x
пересекается фазовыми траекториями под прямым углом, так как там скорость ![]() , т.е. имеет место максимум или минимум
величины x.
, т.е. имеет место максимум или минимум
величины x.
В общем случае это правило недействительно.
Видно, что затухающий (нарастающий) колебательный процесс соответствует на фазовой плоскости сходящейся (расходящейся) спирали. Периодический процесс изобразится в виде замкнутой кривой. Монотонно затухающий (нарастающий) процесс изобразится на фазовой плоскости в виде кривой, монотонно приближающейся (удаляющейся) к положению равновесия.
Типы особых точек и фазовые портреты линейных систем.
Уравнения линейной системы второго порядка имеют вид:
 , или
, или  , где
, где  , при условии
, при условии ![]() .
.
Дифференциальное уравнение фазовых траекторий:
 .
.
Единственная особая точка ![]() ,
, ![]() .
Характеристическое уравнение:
.
Характеристическое уравнение:
![]() .
.
Пусть его корни
![]() различны. Путём подстановки
различны. Путём подстановки ![]() исходная матрица приводится к
диагональному виду. Уравнения движения примут вид:
исходная матрица приводится к
диагональному виду. Уравнения движения примут вид:
 , или
, или  ,
,  .
.
Решения:
![]() ,
, ![]() .
.
Случай вещественных корней.
Пусть ![]() . Исключая время, получим уравнение фазовой
траектории:
. Исключая время, получим уравнение фазовой
траектории:
![]() .
.
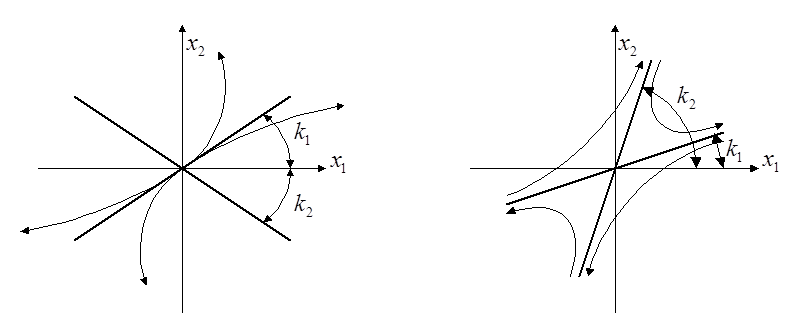
Если знаки корней одинаковы, то фазовые траектории – параболы. Направление движения изображающей точки определяется знаками корней. Если корни отрицательны (положительны), то точка (0,0) называется точкой типа «устойчивый (неустойчивый) узел».
Если знаки корней различны, то фазовые траектории – гиперболы. В этом случае точка (0,0) – точка типа «седло», всегда неустойчива.
Отобразим
полученные фазовые портреты линейной системы на плоскость исходных координат (![]() ). Заметим, что оси парабол и асимптоты
гипербол сами являются фазовыми траекториями и при линейном преобразовании
останутся прямыми. Их отображение на плоскость (
). Заметим, что оси парабол и асимптоты
гипербол сами являются фазовыми траекториями и при линейном преобразовании
останутся прямыми. Их отображение на плоскость (![]() ) примет
вид
) примет
вид ![]() . Подставляя это соотношение в уравнение
движения, имеем:
. Подставляя это соотношение в уравнение
движения, имеем:
 , или
, или ![]() ,
,
откуда находим два значения ![]() и
и ![]() (тангенсы
углов наклона асимптот).
(тангенсы
углов наклона асимптот).
По какой из фазовых траекторий пойдёт переходный процесс в системе, определяется начальными условиями.
Для уточнения
качественной картины фазовых траекторий применяется метод изоклин. Изоклина
– линия, соединяющая точки фазовых траекторий с одинаковым наклоном
касательной. Для каждой изоклины ![]() . Следовательно,
уравнение изоклины
. Следовательно,
уравнение изоклины
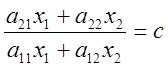 ,
,
это уравнение прямой ![]() . Задаваясь тангенсом угла наклона изоклины
. Задаваясь тангенсом угла наклона изоклины
![]() , находят значение тангенса угла наклона
фазовых траекторий в точках пересечения ими изоклины, что позволяет уточнить
картину фазовых траекторий.
, находят значение тангенса угла наклона
фазовых траекторий в точках пересечения ими изоклины, что позволяет уточнить
картину фазовых траекторий.
Случай равных вещественных корней.
В этом случае
получается вырожденный узел (устойчивый или неустойчивый). Вид фазовых
траекторий в координатах (![]() ):
):
Случай комплексных корней.
Переходной
процесс – колебательный. Пусть ![]() .
Решения:
.
Решения:
![]() ,
, ![]() .
.
Введя новые
переменные ![]() ,
, ![]() ,
преобразуем решения к вещественной форме:
,
преобразуем решения к вещественной форме:
![]() ,
, ![]() .
.
В полярных координатах (![]() ):
):
![]() ,
, ![]() ,
, ![]() .
.
Эти выражения описывают логарифмическую спираль. При отрицательной (положительной) вещественной части корней точка (0,0) называется «точкой типа устойчивый (неустойчивый) фокус».
Необходимо, однако, преобразовать полученные фазовые портреты в исходную систему координат. Для этого воспользуемся методом изоклин.
Пусть, например, задана система
![]() .
.
Корни характеристического
уравнения ![]() . Обозначив
. Обозначив ![]() ,
, ![]() , приведём систему к виду
, приведём систему к виду
![]() ,
, ![]() .
.
Дифференциальное уравнение фазовых траекторий:
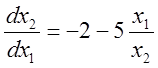 .
.
Для изоклины ![]() находим
находим ![]() .
Возьмём изоклины с
.
Возьмём изоклины с ![]() . Тогда
. Тогда ![]() .
Соответствующие направления касательных к фазовым траекториям показаны
стрелками на рисунке:
.
Соответствующие направления касательных к фазовым траекториям показаны
стрелками на рисунке:
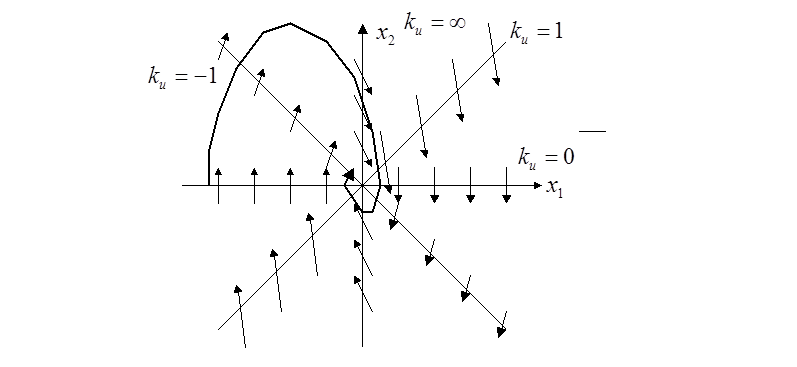
При чисто мнимых корнях здесь получатся эллипсы. Особая точка (0,0) в этом случае называется «точкой типа центр».
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.

