









4.2 Формирование ошибок в процессе адаптивного управления
Современные технические системы имеют сложнейшие математические модели, которые могут быть лишь частью общей модели искусственного интеллекта, которая представляет собой динамическую матрицу пространства состояний размерностью N x M:
 ,
,
где Wi,j - динамическая причинно-следственная связь между i-тым входным параметром состояния объекта управления и j-тым выходным параметром состояния, N и M – конечные числа. Выходные параметры состояния объекта управления Yj(t), будем называть управляемыми, если есть хотя бы одна входная переменная состояния, Xi(t), которую можно измерять и целенаправленно изменять с помощью сигнала управления, Uj(t) формируемого как отрицательная обратная связь по измерениям выходных параметров состояния объекта Yj(t), в течение конечного времени, ТУ , называемым периодом управления.
Любая причинно-следственная связь, Wij, может выступать в качестве эталонной математической модели объекта управленияи, если связь может быть идентифицирована в реальном масштабе времени и адаптирована к текущим условиям существования объекта управления. Априорная база знаний с эталонными математическими моделями может выступать в роли «мозга» интеллектуальной технической системы. Тогда за уровень интеллектуальности измерительной системы может быть принята степень заполнения базы знаний. Предельная размерность базы знаний может служить критерием целесообразности развития системы.
Выходные управляемые переменные, Y(t), – это, как правило, критерии управления, то есть переменные которые являются переходными процессами (как реакция объекта на изменение управляющего воздействия). Входные переменные X(t) , для задач управления и измерения целесообразно разделить на управляющие (параметры, которые можно измерить и изменить с помощью специальных исполнительных устройств) и возмущающие, F(t) (параметры, которые можно только измерить).
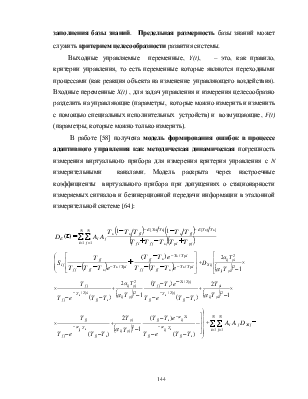
В работе [58] получена модель формирования ошибок в процессе адаптивного управления как методическая динамическая погрешность измерения виртуального прибора для измерения критерия управления с N измерительными каналами. Модель раскрыта через настроечные коэффициенты виртуального прибора при допущениях о стационарности измеряемых сигналов и безинерционной передачи информации в эталонной измерительной системе [64]:

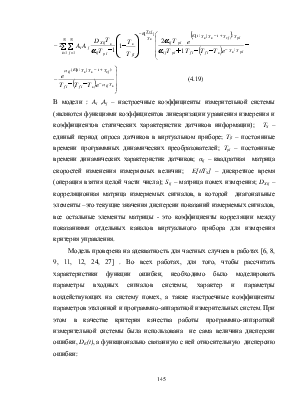
 (4.19)
(4.19)
В модели : Ai ,Aj – настроечные коэффициенты измерительной системы (являются функциями коэффициентов линеаризации уравнения измерения и коэффициентов статических характеристик датчиков информации); TS – единый период опроса датчиков в виртуальном приборе; Tfi – постоянные времени программных динамических преобразователей; Tpi – постоянные времени динамических характеристик датчиков; αij– квадратная матрица скоростей изменения измеряемых величин; E[t/TS] – дискретное время (операция взятия целой части числа); Sij– матрица помех измерения; DXij – корреляционная матрица измеряемых сигналов, в которой диагональные элементы –это текущие значения дисперсии показаний измеряемых сигналов, все остальные элементы матрицы - это коэффициенты корреляции между показаниями отдельных каналов виртуального прибора для измерения критерия управления.
Модель проверена на адекватность для частных случаев в работах [6, 8, 9, 11, 12, 24, 27] . Во всех работах, для того, чтобы рассчитать характеристики функции ошибки, необходимо было моделировать параметры входных сигналов системы, характер и параметры воздействующих на систему помех, а также настроечные коэффициенты параметров эталонной и программно-аппаратной измерительных систем. При этом в качестве критерия качества работы программно-аппаратной измерительной системы была использована не сама величина дисперсии ошибки, DE(t), а функционально связанную с ней относительную дисперсию ошибки:
где , DY(t) - дисперсия показаний эталонной информационно-измерительной подсистемы.
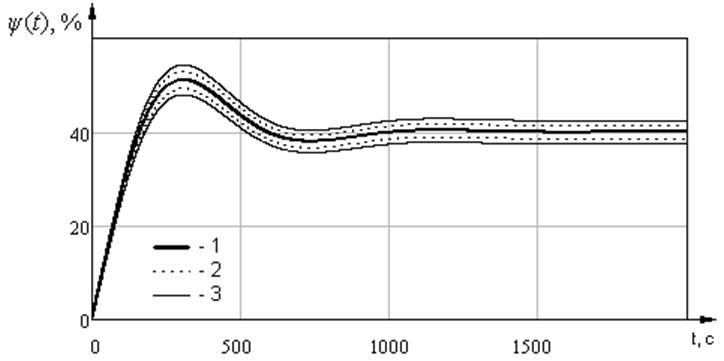
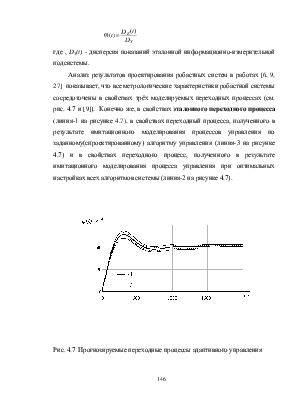
Анализ результатов проектирования робастных систем в работах [6, 9, 27] показывает, что все метрологические характеристики робастной системы сосредоточены в свойствах трёх моделируемых переходных процессах (см. рис. 4.7 и [9]). Конечно же, в свойствах эталонного переходного процесса (линия-1 на рисунке 4.7), в свойствах переходный процесса, полученного в результате имитационного моделирования процессов управления по заданному(спроектированному) алгоритму управления (линия-3 на рисунке 4.7) и в свойствах переходного процесс, полученного в результате имитационного моделирования процесса управления при оптимальных настройках всех алгоритмов системы (линия-2 на рисунке 4.7).
|
|
Рис. 4.7 Прогнозируемые переходные процессы адаптивного управления
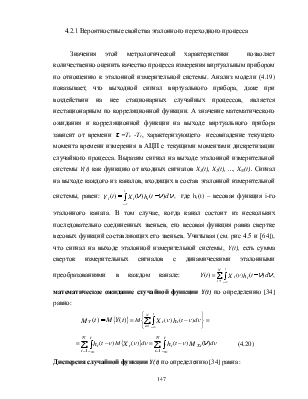
4.2.1 Вероятностные свойства эталонного переходного процесса
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.