

Министерство образования Российской Федерации
филиал государственного образовательного учреждения
высшего профессионального образования
«Московский Энергетический институт
(технический университет)»
в г. Волжском
Кафедра Автоматизации технологических процессов
Исследование многоконтурной системы
автоматического регулирования
Выполнил: Сергеев А.А.
Группа: ПТЭ-00
Преподаватель: Агринская С.А.
Волжский 2003
Исследование многоконтурной системы
автоматического регулирования
4.1 Цель работы
Ознакомиться с устройством двухконтурной системы автоматического регулирования. Сравнить экспериментально полученные динамические характеристики двухконтурной САР и САР с управлением по отклонению.
4.2 Общие сведения о работе
Выбор приемлемой информационной структуры связей объекта с регулятором позволяет во многих случаях существенно уменьшить влияние возмущений на процесс управления. Однако применение систем с компенсацией возмущений ограничивается процессами с заранее известными и контролируемыми возмущениями, к тому же необходимо знать механизм воздействия возмущений на регулируемые параметры объекта с точностью до математической модели. Все эти требования довольно часто оказываются невыполнимы, в связи с чем используют иной подход к построению информационных структур систем управления – вместо непосредственного контроля возмущений осуществляют контроль соответствующим образом подобранных вспомогательных переменных, характеризующих текущее изменение состояния объекта, вызванное действием этих возмущений. На рисунке 4.1 приведен возможный вариант такой структуры, используемый в данной лабораторной работе.
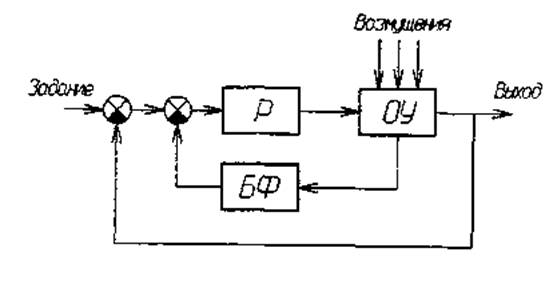
Рис. 4.1 Структура системы управления
Регулирование осуществляется регулятором Р, на вход которого, помимо отклонения основной регулируемой величины, подается сигнал от изменения вспомогательной переменной состояния, предварительно надлежащим образом сформированный в формирующем блоке БФ.
Отличие систем с контролем вспомогательных переменных состояния объекта от систем с компенсацией возмущений состоит в том, что контроль каждой переменной состояния добавляет в структуру системы добавочный замкнутый контур (поскольку на изменение переменной состояния влияют не только возмущения, но и регулирующее воздействие); системы с несколькими замкнутыми контурами называют многоконтурными.
4.3 Описание лабораторной установки
Объектом исследования в данной работе является двухемкостной гидравлический объект, состоящий из двух резервуаров, соединенных трубопроводом через перепускной кран. Уровень жидкости во втором резервуаре является выходной величиной. Входной величиной является расход жидкости, поступающей в первый резервуар. В качестве управляющего устройства используется регулятор Р25.1 с исполнительным механизмом постоянной скорости.
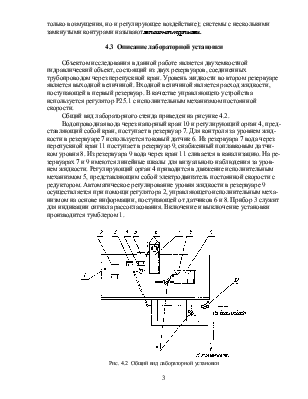
Общий вид лабораторного стенда приведен на рисунке 4.2.
Водопроводная вода через напорный кран 10 и регулирующий орган 4, представляющий собой кран, поступает в резервуар 7. Для контроля за уровнем жидкости в резервуаре 7 используется токовый датчик 6. Из резервуара 7 вода через перепускной кран 11 поступает в резервуар 9, снабженный поплавковым датчиком уровня 8. Из резервуара 9 вода через кран 11 сливается в канализацию. На резервуарах 7 и 9 имеются линейные шкалы для визуального наблюдения за уровнем жидкости. Регулирующий орган 4 приводится в движение исполнительным механизмом 5, представляющим собой электродвигатель постоянной скорости с редуктором. Автоматическое регулирование уровня жидкости в резервуаре 9 осуществляется при помощи регулятора 2, управляющего исполнительным механизмом на основе информации, поступающей от датчиков 6 и 8. Прибор 3 служит для индикации сигнала рассогласования. Включение и выключение установки производится тумблером 1.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.