Министерство образования Российской Федерации
филиал государственного образовательного учреждения
высшего профессионального образования
«Московский Энергетический институт
(технический университет)»
в г. Волжском
Кафедра Автоматизации технологических процессов
Исследование динамических характеристик теплового
объекта и определение параметров настройки ПИ-регулятора
Выполнил: Селезнев А.
Группа: ПТЭ-00
Преподаватель: Агринская С.А.
Волжский 2003
Исследование динамических характеристик теплового
объекта и определение параметров настройки ПИ-регулятора
2.1 Цель работы
Ознакомиться с устройством системы автоматического регулирования температуры. Научиться на практике определять динамические свойства линейных объектов и получить навыки настройки параметров ПИ-регулятора.
2.2 Общие сведения о работе
Одним из методов экспериментального определения динамических свойств объектов управления является снятие переходной характеристики объекта в отсутствие действия системы автоматического регулирования (снятие кривой разгона). Для этого на вход объекта при отключенной системе автоматического регулирования (в режиме ручного управления) подают воздействие в форме единичной ступенчатой функции и, фиксируя изменение во времени выходной величины объекта, получают кривую разгона. По данной кривой можно определить характеристики объекта управления при его приближении типичной передаточной функцией, по которым, в свою очередь, определяются параметры настройки регулятора.
2.3 Описание лабораторной установки
Объектом исследования в данной работе является тепловой объект, состоящий из нагревателя (лампа накаливания) и термосопротивления, величина омического сопротивления которого представляет собой выходную величину. Входной величиной является напряжение на нагревательном элементе, которое изменяется синхронно с величиной угла поворота однооборотного исполнительного механизма (МЭО) и может задаваться как в ручную, так и системой автоматического регулирования, выполненной на основе регулятора РП-4Т. Контроль температуры осуществляется при помощи прибора Р-160.
Общий вид лабораторного стенда приведен на рисунке 2.1.
Объект управления 1 состоит из нагревательного элемента (лампа накаливания) и термосопротивления, омическое сопротивление которого преобразуется в токовый сигнал, который, в свою очередь, используется для контроля за температурой (при помощи прибора 10) и как сигнал обратной связи. В нижней части кожуха 1 имеется заслонка, которая позволяет изменять условия теплообмена внутри объекта управления и тем самым вносить возмущения в его работу.
Сигнал обратной связи поступает на регулятор 2, где сравнивается с заданием, величина которого устанавливается задатчиком 3. В условиях автоматического регулирования (режим работы устанавливается переключателем 4) управляющее воздействие, вырабатываемое регулятором, через бесконтактный реверсивный пускатель 8 воздействует на исполнительное устройство 11, представляющее собой однооборотный механизм типа МЭО.
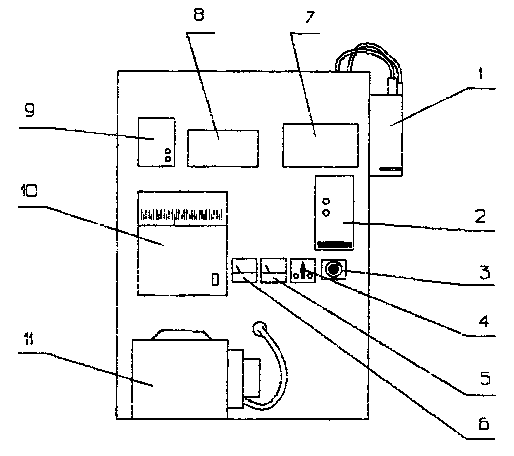
Рис. 2.1 Лабораторный стенд:
1 - объект управления (нагревательный элемент и термосопротивление);
2 - регулятор РП-4Т; 3 - задатчик; 4 - переключатель режимов работы;
5 - указатель положения; 6 - индикатор напряжения на нагревательном элементе;
7 - блок питания; 8 - пускатель; 9 - автомат питания;
10 - контрольно-измерительный прибор; 11 - исполнительный механизм:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.