ЗАДАНИЕ 1. ИНДУКТИВНЫЕ И ТРАНСФОРМАТОРНЫЕ ИЗМЕРИТЕЛЬНЫЕ ПРЕОБРАЗОВАТЕЛИ.
Преобразователь – устройство, которое преобразует изменения входной величины в соответствующий выходной сигнал, удобный для дальнейшего использования, и служит воспринимающим органом ряда элементов (датчиков с промежуточным преобразованием). Преобразователи устройств весьма разнообразны. Наибольшее распространение получили преобразователи, использующие принцип изменения индуктивности, т. е. индуктивные преобразователи.
Индуктивные преобразователи.
При создании индуктивных преобразователей широко используются методы, основанные на электромагнитных явлениях.
Индуктивные преобразователи имеют по сравнению с резисторными преобразователями существенные преимущества, например, надежность и отсутствие скользящих контактов. К недостаткам индуктивных преобразователей можно отнести наличие остаточного сигнала, чувствительность к изменению напряжения питания, а также наличие фазовых искажений.
Индуктивные преобразователи служат для измерения и преобразования угловых и линейных перемещений.
 В индуктивных датчиках перемещение стального
В индуктивных датчиках перемещение стального
якоря вызывает изменение индуктивного сопротивления катушки
со сталью. Эти датчики служат для преобразования углового или линейного
механического перемещения в изменение величины переменного тока.
Индуктивные датчики применяют для измерения размеров небольших деталей,
сортировки штучных изделий, как бесконтактные переключающие устройства и т. п.
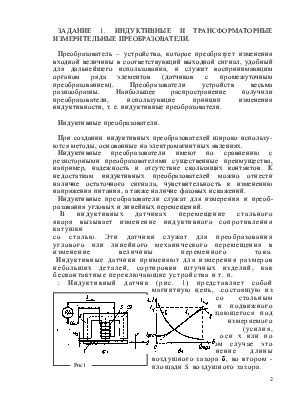
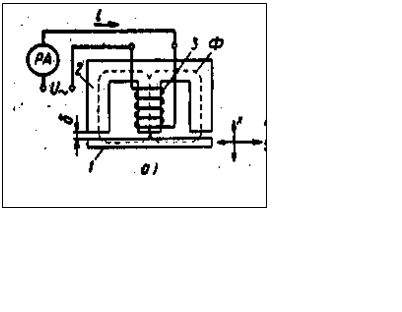
 : Индуктивный датчик (рис. 1) представляет
собой магнитную цепь, .состоящую из катушки 3 со стальным сердечником 2 и
подвижиого якоря 1, перемещающегося под действием измеряемого параметра
(усилия, перемещения) по оси х или по оси у. В первом случае это вызывает
изменение длины воздушного зазора d, во
втором - площади S воздушного зазора.
: Индуктивный датчик (рис. 1) представляет
собой магнитную цепь, .состоящую из катушки 3 со стальным сердечником 2 и
подвижиого якоря 1, перемещающегося под действием измеряемого параметра
(усилия, перемещения) по оси х или по оси у. В первом случае это вызывает
изменение длины воздушного зазора d, во
втором - площади S воздушного зазора.
Индуктивность L электромагнитной цепи в виде магнитопровода с обмоткой и воздушным зазором без учета рассеяния магнитного потока определяют как
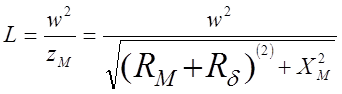
где w — число витков обмотки; zM—полное магнитное сопротивление цепи; RM и xM —активная и реактивная составляющие магнитного сопротивления магнитопровода; Rd —магнитное сопротивление воздушного зазора.
Изменяя величину активной составляющей магнитного сопротивления
( RM + Rd ) реактивной составляющей магнитного сопротивления хм, а также число витков обмотки w, можно изменять индуктивность. Эти принципы используются при создании индуктивных преобразователей, в которых изменение индуктивного сопротивления обмотки происходит при перемещении стального сердечника, проводящей пластины за счет изменения магнитной проницаемости ферромагнитного сердечника под воздействием механических напряжений, температуры и т. д. Если магнитная цепь имеет не одну, а две обмотки, то между ними существует взаимная индуктивность, характеризуемая коэффициентом М:
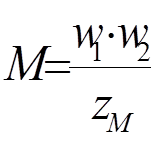
где w1 и w2 - число витков
Следовательно, изменяя величину первой и второй обмоток. магнитного сопротивления ZM цепи можно изменять взаимную индуктивность между обмотками. На изменении взаимной индуктивности между двумя обмотками при перемещении стального сердечника или обмотки основаны взаимоиндуктивные, трансформаторные преобразователи.
Индуктивные датчики отличаются простотой устройства и надежностью в работе, отсутствием скользящих контактов, способностью отдачи большой мощности в выходную цепь, возможностью работы на переменном токе промышленной частоты.
Однако им свойственны также существенные недостатки: наличие остаточного сигнала I ОСТ , чувствительность к изменению напряжения и частоты питания, зависимость выходной величины от изменений температуры.
Индуктивные датчики обладают высокой надежностью, большим коэффициентом усиления, что и обусловливает широкое применение их в автоматических системах.
ТРАНСФОРМАТОРНЫЕ ПРЕОБРАЗОВАТЕЛИ
Трансформаторные преобразователи основаны на изменении взаимной индуктивности между двумя системами обмоток.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.