На рисунке 4.11 представлена
функциональная схема виртуального стенда для имитационного моделирования
процесса адаптивного управления эндогазогенератором (см. [27] и главу 5.2).
Адаптивное управление производится по текущему значению критерия управления:  , где
, где ![]() - текущее
значение влажности измеренное техническими средствами автоматизации,
- текущее
значение влажности измеренное техническими средствами автоматизации, ![]() - текущее значение влажности,
прогнозируемое по математической модели эндогазогенератора.
- текущее значение влажности,
прогнозируемое по математической модели эндогазогенератора.
В работах [27, 59] показано, что текущая идентификация в робастных системах с эталонной моделью объекта управления имеет оптимальные режимы обработки информации в управляющей системе.
На рисунке 4.12 сплошной линией показаны результаты расчётов по модели (4.36). Квадратиками показаны результаты моделирования процесса формирования ошибок в процессе адаптивного управления по отношению к эталонному процессу регулирования. Согласно схеме выделения ошибок при цифровой обработке информации при адаптивном управлении эндогазогенератором (см. рис. 4.11 и [27]) каждая частная реализация ошибок в переходном процессе, E(t) – это один квадратик на рисунке 4.12.
Результаты моделирования представлены на рисунке 4.12, из которого видно, что результаты, полученные имитационным моделированием, в зоне оптимальных режимов обработки информации, хорошо согласуются с результатами, полученными по математической модели формирования дисперсии последовательности ошибок идентификации, D2E(iTSУ) (4.36). При этом, качество идентификации определяется, в основном, периодом опроса датчиков: TSУ = k·TS , где k – порядковый номер реализации.
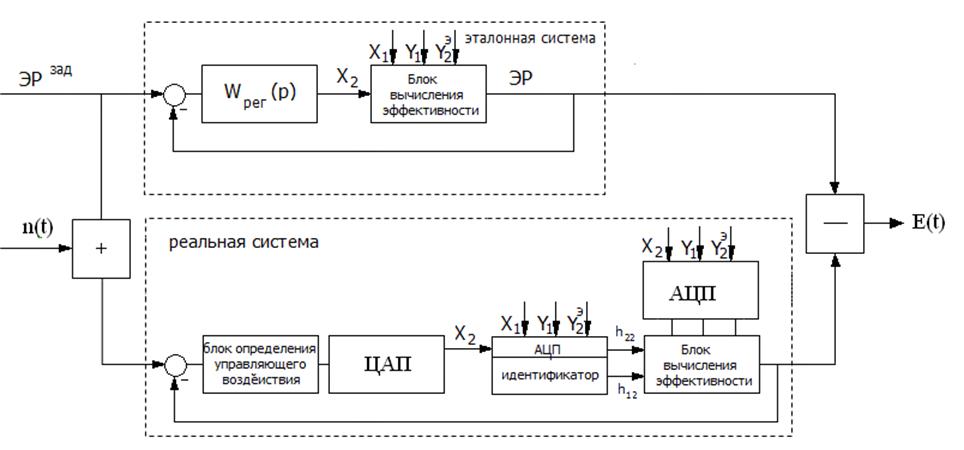
Рис. 4.11 Функциональная схема стенда для диагностики программного обеспечения
Стремление результатов
расчёта по модели (4.51) в величину  согласуется с
результатами, полученными в работе [9].
согласуется с
результатами, полученными в работе [9].
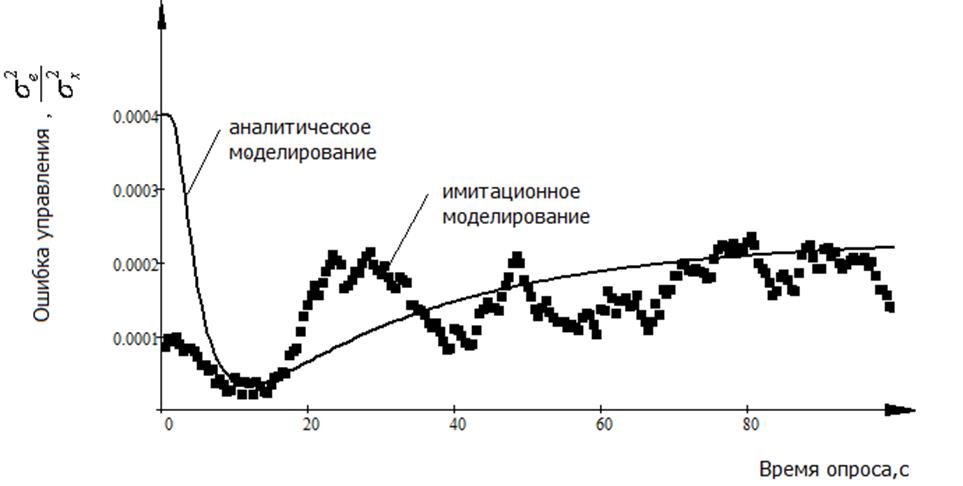
Рис. 4.12 Моделирования процессов адаптивного управления [27]
На рисунке 4.12 сплошной
линией показаны результаты расчётов по модели (4.36). Квадратиками показаны
результаты моделирования процесса формирования ошибок в процессе адаптивного
управления по отношению к эталонному процессу регулирования. Стремление
результатов расчета по модели (4.36) в величину: согласуется
с результатами , полученными в работе [9] и объясняется стремлением периода
дискретизации t0 к нулю. Стремление результатов физического
моделирования в величину  объясняется
стремлением периода опроса, TS к времени измерения, TC = 1 секунде. Большой разброс
экспериментальных данных справа от минимального значения ошибки (см. рис. 4.12)
можно объяснить плохим отделением помехи от полезного сигнала. Анализ
результатов физического моделирования, представленных на рисунке 4.12 показал,
что для расчёта оценок дисперсии ошибки в показаниях идентификатора можно
использовать математическую модель методической динамической погрешности 4.36
[27].
объясняется
стремлением периода опроса, TS к времени измерения, TC = 1 секунде. Большой разброс
экспериментальных данных справа от минимального значения ошибки (см. рис. 4.12)
можно объяснить плохим отделением помехи от полезного сигнала. Анализ
результатов физического моделирования, представленных на рисунке 4.12 показал,
что для расчёта оценок дисперсии ошибки в показаниях идентификатора можно
использовать математическую модель методической динамической погрешности 4.36
[27].
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.