Министерство образования Российской Федерации
Комсомольский-на-Амуре государственный технический университет
Кафедра электропривода и автоматизации
промышленных установок
СТРУКТУРНЫЙ АНАЛИЗ САР
Методические указания к лабораторным работам по курсу
«Теория автоматического управления»
Комсомольск-на-Амуре 2002
УДК 62.50
Структурный анализ систем автоматического регулирования: Методические указания к лабораторным работам / Сост. С. В. Стельмащук. – Комсомольск-на-Амуре: Комсомольский-на-Амуре гос. тех. ун–т, 2001. – 12 с.
Данное методическое пособие предназначено для практической проработки навыков по структурным преобразованиям, определения статических характеристик и асимптотических ЛАЧХ структурных схем. Для выполнения данной лабораторной работы необходима соответствующая подготовка студентов: знание передаточных функций элементарных звеньев, а также их график частотных характеристик.
Предназначено для студентов специальностей 2101 и 1804. Методическое пособие также полезно всем кто интересуется структурным анализом САР.
Печатается по постановлению редакционно-издательского совета Комсомольского-на-Амуре государственного технического университета.
Согласовано с отделом стандартизации.
ЦЕЛЬ РАБОТЫ
Приобретение навыков по определению передаточных функций структурных схем САР, преобразованию структурных схем и по определению различных характеристик структурных схем.
1 Понятие структурной схемы
Любой механизм или технологический процесс можно разбить на функциональные составляющие – звенья, поведение которых описывается простыми диф. уравнениями. Между звеньями существуют связи по параметрам, и таким образом совокупность звеньев и параметрических связей между ними образуют структурную схему описывающую процессы в механизме или ход какого либо технологического процесса.
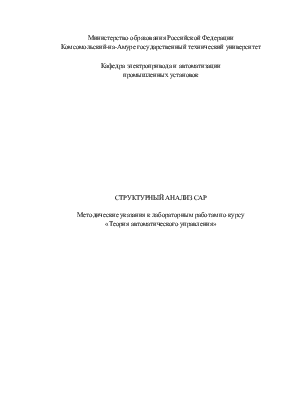
В теории автоматического регулирования (ТАР) одним из основных понятий является обратная связь в системах регулирования. Структурная схема САР с обратной связью будет иметь вид
где Wор – передаточная функция звена объекта регулирования;
Wос – передаточная функция звена обратной связи;
Xзад – задающий сигнал;
Xос – сигнал обратной связи;
Xрег – регулируемый сигнал;
Xош – сигнал ошибки системы.
Основной функцией обратной связи является влияние регулируемого параметра на входной сигнал объекта регулирования, таким образом, придавая всей системе регулирования необходимые характеристики. Сигнал на входе объекта регулирования, полученный разницей между задающим сигналом и сигналом обратной связи Xош = Xзад – Xос, в ТАР называется сигналом ошибки. Сигнал ошибки характеризует точность системы регулирования. Под точностью понимается способность системы регулирования отрабатывать задающее воздействие Xзад таким образом, чтобы сигнал обратной связи был примерно равен сигналу задания. Считается что чем меньше сигнал ошибки, тем выше точность системы. Если величина ошибки при установившемся процессе отлична от нуля, то мы имеем дело со статическими системами регулирования, в противном случае – система регулирования называется астатической.
2 Определение передаточных функций САР
Для получения различных характеристик САР необходимо по структурной схеме определить передаточную функцию всей системы регулирования. Для этого необходимо знать типы соединения звеньев. Их три:
1. Последовательное соединение, где выходной сигнал предыдущего звена равен входному сигналу последующего.

Передаточная функция системы последовательно соединённых звеньев равна произведению передаточных функций всех звеньев:

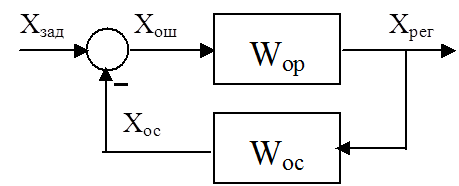
2. Параллельное соединение, где на вход всех звеньев поступает один и тот же сигнал Xвх = Xвх1 = Xвх2 = … = XвхN, а выходной сигнал равен сумме выходных сигналов отдельных звеньев Xвых = Xвых1 + Xвых2 + … + XвыхN.
Передаточная функция системы параллельно соединённых звеньев равна сумме передаточных функций отдельных звеньев:

3. Соединение с обратной связью, где, при соединении двух звеньев, звено с передаточной функцией W1 охвачено обратной связью со звеном с передаточной функцией W2. При этом связь, где находится звено с передаточной функцией W1, называется прямой.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.